 標記、前のブログに書き留めてあったのだが、出てきづらくなったので、再び貼る。古い名演がYoutubeにはたくさんあるのだ。
標記、前のブログに書き留めてあったのだが、出てきづらくなったので、再び貼る。古い名演がYoutubeにはたくさんあるのだ。
やっぱりジョルジュ・シフラーのノクターンじゃのう。
オッサンは生きている。
標記、前のブログに書き留めてあったのだが、出てきづらくなったので、再び貼る。古い名演がYoutubeにはたくさんあるのだ。
やっぱりジョルジュ・シフラーのノクターンじゃのう。
驚いた。こんなブツがあったとは知らなかった。
先月、ドイツのV1のことにも少し触れたエントリを書いたが、巡航ミサイルとしてはこのV1こそが古今未曽有の新着想だとばかり思い込んでいた。巡航ミサイルの発想が遠く第1次大戦頃のアメリカにまでさかのぼるとは、まったく思いもよらなかった。
だが、この映像で見る限り、必ずしもうまく行った兵器とは言い難いようだ。第一次大戦には間に合っていないし、それほど長射程でもなければ精度が良いわけでもなさそうだ。
 唐突だが、
唐突だが、
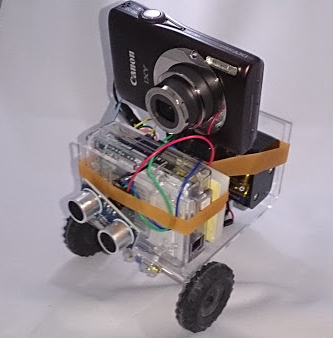
モーターで動く小さい台車にデジカメを乗せ、走り回らせて動画を撮りたい。虫の視点で動画を撮るわけだ。人の視点では思いもよらない、家の中のいろいろなものが写り込んで、面白いのではないだろうか。
Arduinoで制御し、手持ちの超音波センサで障害物を避けるようにしたい。
できるだけシンプルに作るため、操向装置を工夫する。普通ならサーボなどを用いて操向輪の向きを操作するのだろうが、ここを単純にしたい。
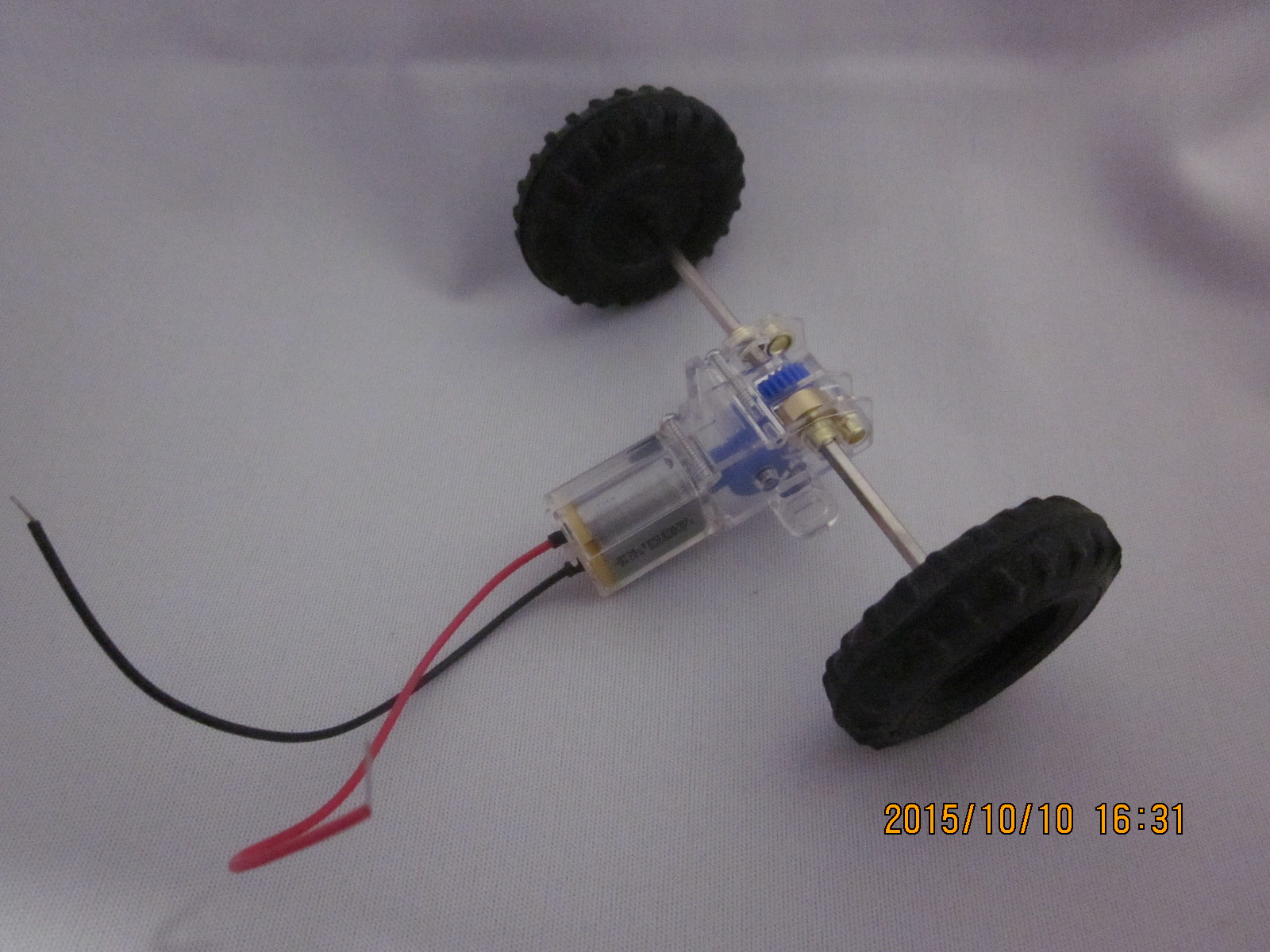
3輪の台車にし、後輪をキャスターのようなものにする。前進時はまっすぐに向くが、後退させるとモーメントがかかって後輪が傾き、左右どちらかに振れるようにする。そうすると、前進・後退の制御のみであちらこちらに台車を走行させることができるだろう。直進していって、ある程度まで壁などの障害物に近づくと、後退させる。後退させると、左右どちらかに向きが振れるので、超音波センサで測距しつつ後退させ、ある程度障害物が離れたらまた前進させる。
Arduinoでモーターを回すには、FETやトランジスタを用いる方法もあるが、前進・後退をさせるためには逆転ができた方がよい。それをFETなどを使ってスクラッチでやるのは面倒くさい。そこで、「モータードライバIC」を購入して、手っ取り早く済ませよう。
検索すると、よく売れていて入手しやすく、かつ他人の作例も多そうなものには東芝のTA7291Pというのがある。メーカーのサイトには生産終了予定と出ているものの、秋葉原へ行けば多分千石電商あたりに置かれているだろう。180円とか300円とか、そんな値段なので、どうってことはない。
このモータードライバに合うような模型用のモーターを選ぶ。スペックシートによるとTA7291Pは1A流せる。乾電池で台車を動かすとして、Arduinoには5Vがいるから、単3×4本の6Vとして、良さげなものをマブチのページで見繕う。
6Vだと電流が途端に2.9Aくらいにハネ上がり、モータードライバに合わない。しかも、急に1000円近くするので、趣味の工作にはちょっとどうかと思う。それで、電圧は3端子レギュレータを一つ買って落とすとして、3Vのものを見繕うと、「FA-130RA」というのに結局落ち着きそうだ。このモーターはよく使われているようで、他の方の作例にも良く出てくる。電圧は3Vまで、500mAだから、TA7291Pで動かすにはぴったりだ。
このモーターをタミヤあたりのギアボックスにうまく取り付ければいいだろう。
ギヤボックスを探すと、モーター込みのものも多くあるようだ。見ていると、このFA-130RA込みのギヤボックスがある。「タミヤ・3速クランクギヤーボックス」というやつだ。モーター込みで600円かそこらは安い。
最後に、ゴムの車輪を三つ、だな。まあ、これは何か、いいものがあるだろう。
休みなので、さっそく秋葉原へ行き、いろいろと買い込んでくる。秋葉原にはないものを、帰りに北千住の東急ハンズで買う。

まず、タミヤの「ミニモーター標準ギヤボックス」というのを買ってみた。モーター付きだが810円。安いかと言うと微妙なところだが、自力でギヤをいろいろやるとこれが結構大変なので、まあ、値段はこんなところだろう。

それから、走行させるためのゴムタイヤを買う。向きをうまく変えるための「キャスター」は東急ハンズで買う。

タイヤはさておき、この「キャスター」が、今回の私の工夫だ。前進・後退のみ、モーター1個の制御で、操向もしてしまおう、という工夫だ。このキャスターの変向角度を一定に制限し、後退する時だけランダムに向きが変わるようにするのだ。
それから東芝のモータードライバ「TA7291P」と、モーター用に電圧を落とす3端子レギュレータ。3端子レギュレータは3.3Vのものを探したが、なかったので、2.5Vのものを買った。これでだめなら、抵抗分圧で電圧を落とそう。

ギヤボックスは組み立てるとこうなる。
これを、いつもの100円ショップ「ダイソー」にあるアクリルの枠にねじ止めし、タイヤを取り付け、例のキャスターも取り付ける。

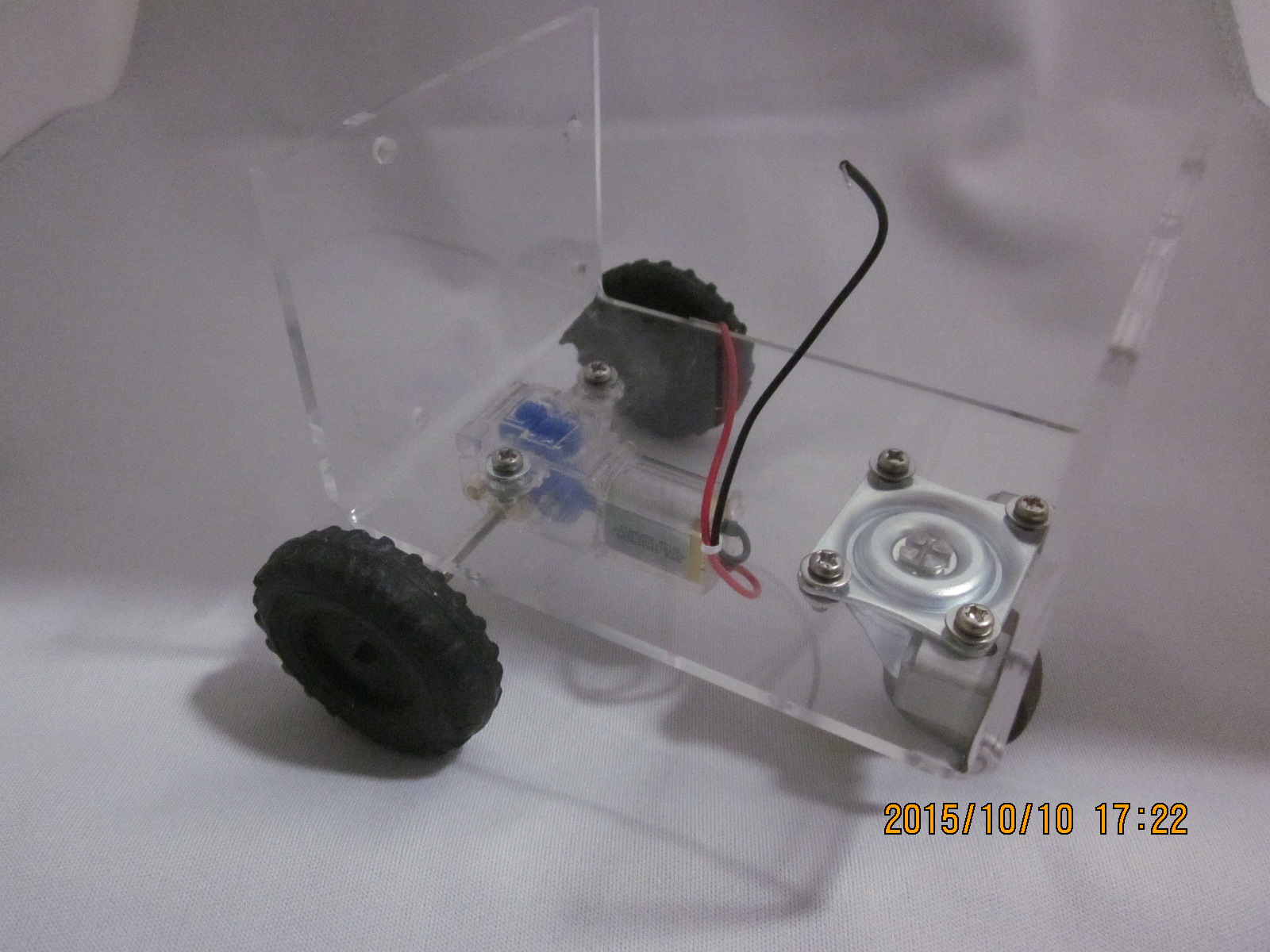
このキャスターの根元に、適当な金具を共締めし、変向角度を制限してやる。
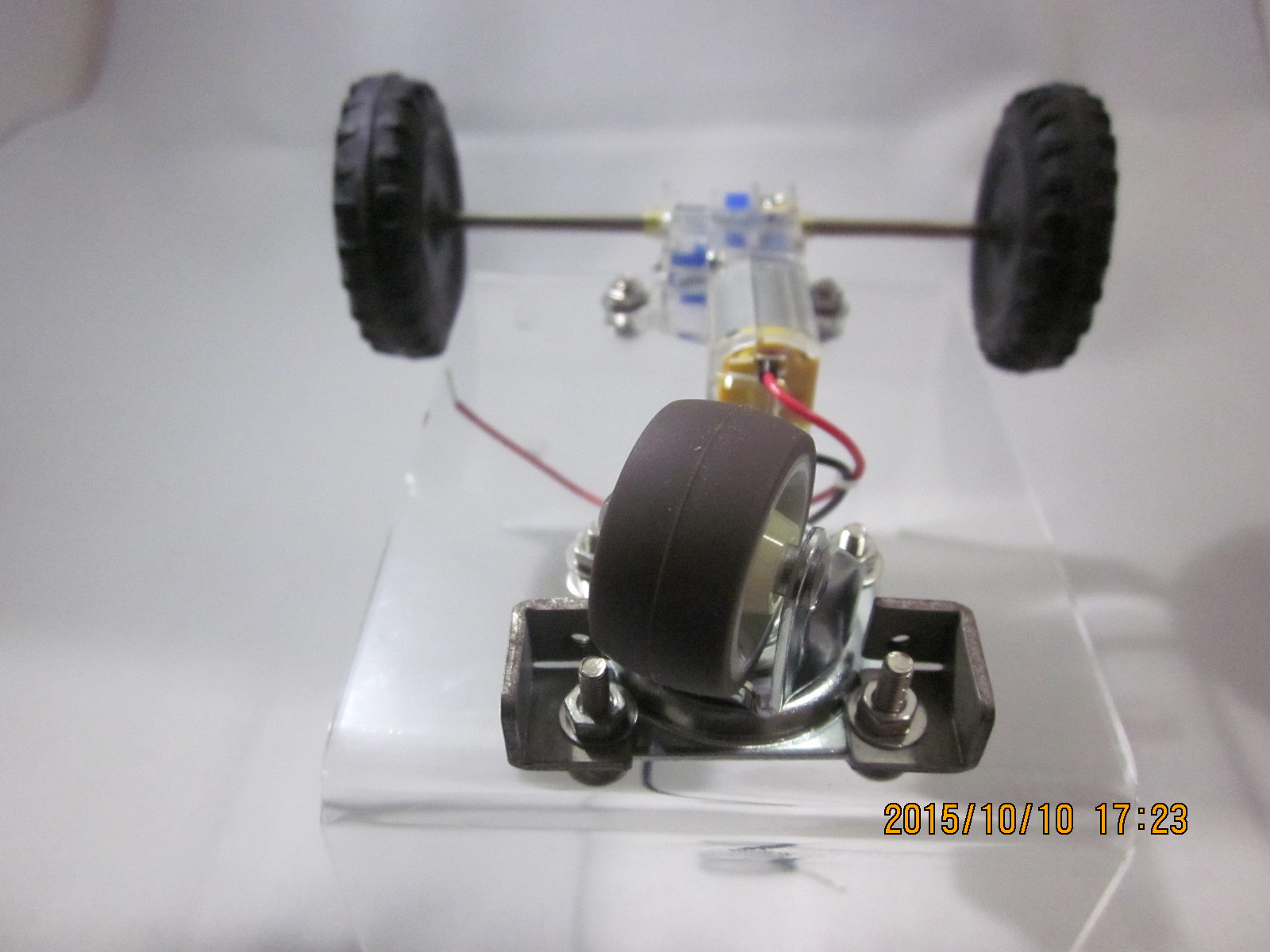
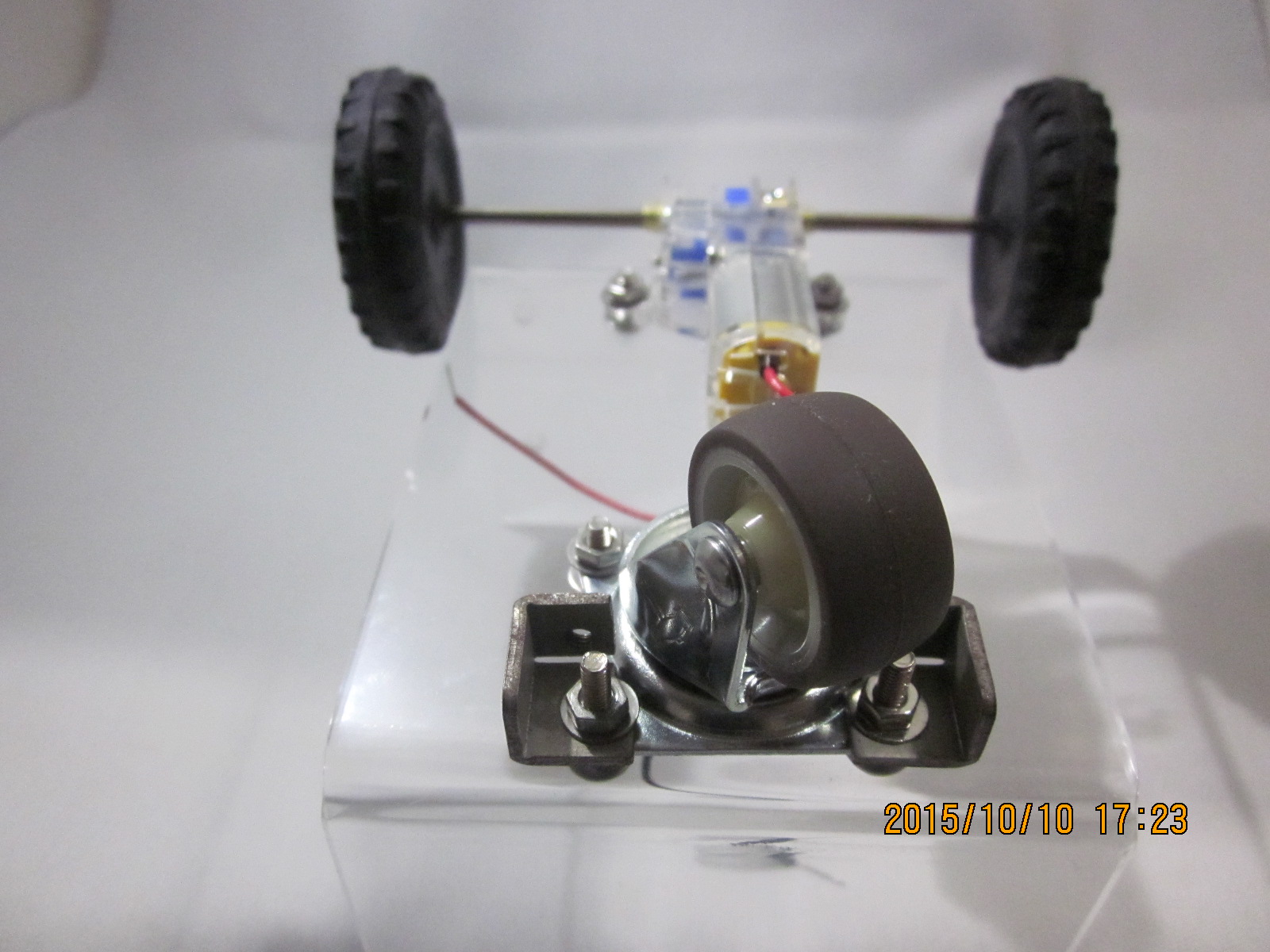
これが、「モーター1個だけで向きも変える工夫」である。ためしに、2.5Vで動かしたがどうも力がなくていけない。そこで、ギア比をうんと落とし、9Vを直接モータにくれてやることにした。まあ、壊れやせんだろ。電流を測ると、200mAくらいなので、Arduinoに直接流さなければ許容範囲である。
さて、機械のほうはこれくらいのぞんざい適当、次に電子回路のほうに取り掛かる。
次のように考え、この通りブレッドボードを作る。
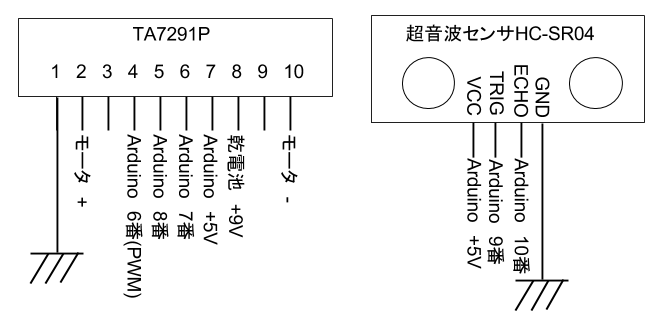
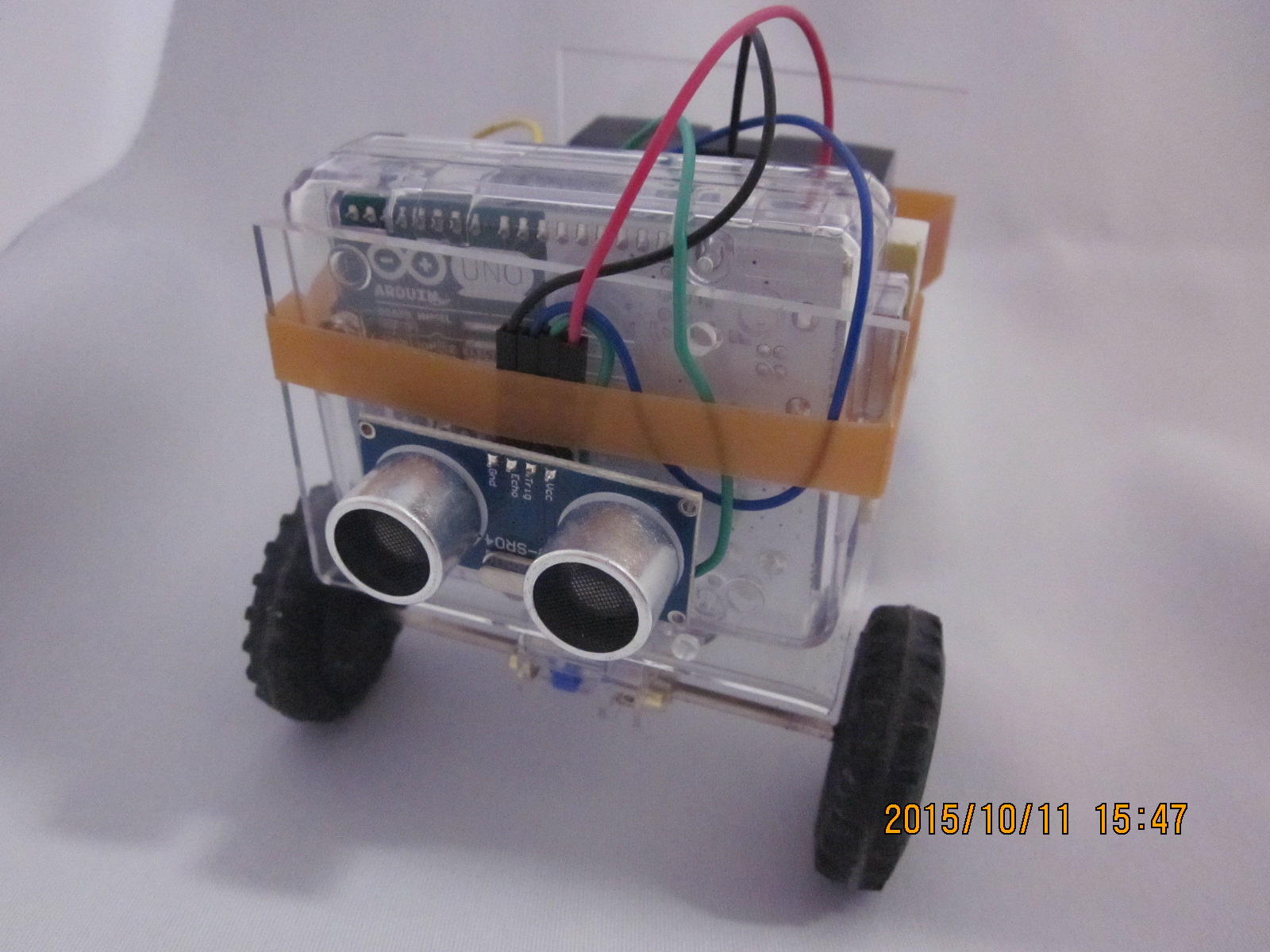
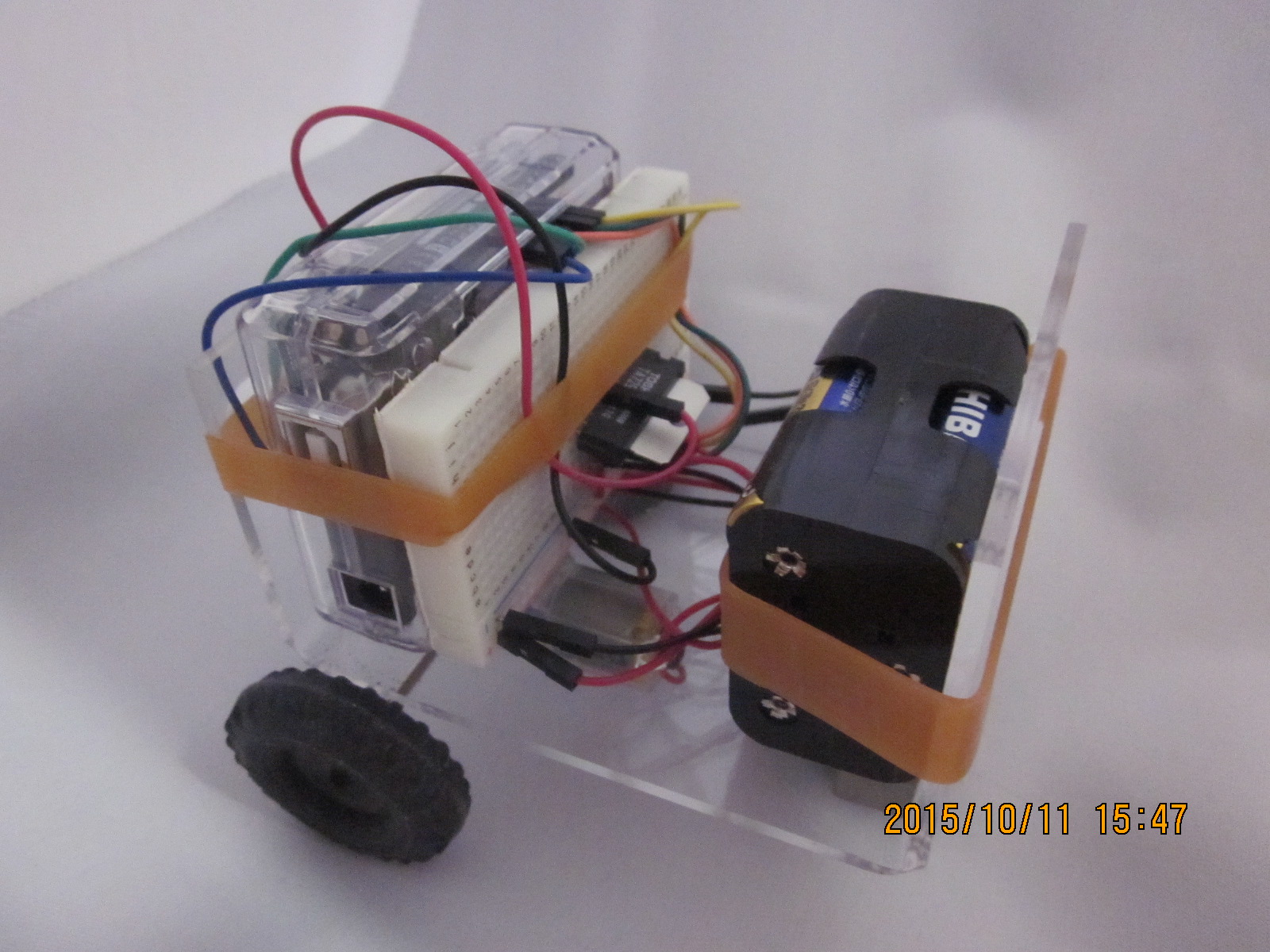
モータ付きの台車に取り付けると、次のとおりである。
スケッチは次のように書く。
// // crawlCar.ino // 27.10.11(日) 0600~ // 佐藤俊夫 // 台車を這いまわらせる // // モータードライバ const int MOTOR1 = 7; const int MOTOR2 = 8; const int MOTORPWM = 6; // 超音波センサ const int TRIG = 9; const int ECHO = 10; // 現在の台車の状態 const unsigned int STOP = 0, FORWARD = 1, BACK = 2; // ストップさせる距離、前進を再開させる距離 const float FOWSTOP = 20.0, FOWCONT = 50.0; // ある程度はバックを持続するようバック継続時間制限(ミリ秒) const unsigned int BACKLIMIT = 2000; // PWMの強さ const unsigned int POWER = 128; void setup(){ pinMode(MOTOR1,OUTPUT); // モータードライバ入力1へ pinMode(MOTOR2,OUTPUT); // モータードライバ入力2へ pinMode(TRIG,OUTPUT); pinMode(ECHO,INPUT); } void loop(){ static unsigned int state = FORWARD; static unsigned long int backstart = 0; float range = 0.0; range = ranging(); if(range >= FOWSTOP && state != BACK){ state = motor(FORWARD); } else if(range < FOWCONT){ if(state == FORWARD){ state = motor(BACK); backstart = millis(); } else{ if(millis() >= (backstart + BACKLIMIT)){ state = motor(FORWARD); } else{ state = motor(BACK); } } } else{ if(millis() >= (backstart + BACKLIMIT)){ state = motor(FORWARD); } } } // // モーター制御 // unsigned int motor(unsigned int command){ switch(command){ case FORWARD: digitalWrite(MOTOR1, LOW); digitalWrite(MOTOR2, HIGH); analogWrite(MOTORPWM, POWER); break; case BACK: digitalWrite(MOTOR1, HIGH); digitalWrite(MOTOR2, LOW); analogWrite(MOTORPWM, POWER); break; case STOP: digitalWrite(MOTOR1, LOW); digitalWrite(MOTOR2, LOW); break; default: digitalWrite(MOTOR1, LOW); digitalWrite(MOTOR2, LOW); break; } return command; } // // 測距 // float ranging(){ float time = 0.0, range = 0.0; digitalWrite(TRIG,LOW); delayMicroseconds(1); digitalWrite(TRIG,HIGH); delayMicroseconds(1); digitalWrite(TRIG,LOW); time = pulseIn(ECHO,HIGH); if (time > 0) { range = (time / 2) * 340 * 100 / 1000000; return(range); }else{ return(9999); } }
これを走り回らせると、次のようになる。
これにカメラを積み込み……
で、動画を撮影するわけだ。
なかなか這いまわっている感じが出て、いいと思う。
 Raspberry Piは要するにLinuxマシンなので、ウェブサーバも選り取り見取りだ。単にウェブインターフェイスを備えたモノのプロトをするならArduinoのほうが手っ取り早いが、いかんせん、リッチなウェブ・コンテンツをArduino+ETHERNET SHIELD 2でサービスするのは難しく、不可能ではないにもせよ、ウェブ・コンテンツに写真を置くなどというのはほとんど無理であった。
Raspberry Piは要するにLinuxマシンなので、ウェブサーバも選り取り見取りだ。単にウェブインターフェイスを備えたモノのプロトをするならArduinoのほうが手っ取り早いが、いかんせん、リッチなウェブ・コンテンツをArduino+ETHERNET SHIELD 2でサービスするのは難しく、不可能ではないにもせよ、ウェブ・コンテンツに写真を置くなどというのはほとんど無理であった。
Raspberry Piはコンピュータ・パワーが大きいから、大きなウェブ・コンテンツも本体内に飲み込んでしまえる。
そこで、である。Raspberry Piで遊ぶのに、なにも世間の教科書通りにPythonやRubyの作例を打ち込むだけが能ではない。CだってC++だって、PerlだってPHPだって動くはずである。SMTPもPOPもNTPも、なんだって動く。多分MySQLだのPostgreSQLだのも動くだろう。
Apacheをインストールして動かしてみよう。それから、PHPでGPIOを突っついてみよう。これは、PHPでハードウェアを動かすことにつながる。無駄に贅沢なWebインターフェイスでLチカ、というのも面白い。
まず、今起動しているモノを確認してみよう。RedHat系のLinux、Fedoraなどはこういう時に「chkconfig –list」などとするが、Raspberry Piに入っているのは「Raspbian」だ。RaspbianはDebian系のディストリビューションなので、chkconfigはない。
私はUNIX育ちのオッサンで、SVR4.2の管理人を長年やっきた。Linuxに関してはフリー時代のRedHat(4~9ぐらいまで)、それ以降はずっとFedora Coreを使ってきたので、Debianは良く知らないのである。ま、これも機会だから、ちょっと体験してみようではないの。
ネット情報によると「insserv」「update-rc.d」「sysv-rc-conf」「rcconf」「upstart」などがあるという。
# insserv -s K:01:0 1 6:triggerhappy K:07:0 6:umountfs K:04:0 6:umountnfs.sh K:02:0 6:sendsigs K:01:0 6:plymouth K:03:0 1 6:rsyslog K:06:0 6 S:hwclock.sh K:01:0 1 6:alsa-utils K:06:0 6:networking K:05:0 1 2 3 4 5 6 S:rpcbind K:05:0 1 2 3 4 5 6 S:nfs-common K:01:0 6:urandom K:01:0 1 6:avahi-daemon K:01:0 1 6:dhcpcd K:01:0 1 6:cgroup-bin K:08:0 6:umountroot K:09:0:halt K:09:6:reboot K:01:0 1 6:fake-hwclock K:01:0 1 2 6:lightdm K:01:0 1 6:ifplugd S:02:S:udev S:03:S:keyboard-setup S:15:S:console-setup S:01:2 3 4 5:triggerhappy S:08:S:mountall.sh S:09:S:mountall-bootclean.sh S:12:S:mountnfs.sh S:13:S:mountnfs-bootclean.sh S:04:2 3 4 5:plymouth S:01:2 3 4 5:rsyslog S:16:S:alsa-utils S:11:S:networking S:10:S:urandom S:04:S:mountdevsubfs.sh S:05:S:checkroot.sh S:03:2 3 4 5:avahi-daemon S:02:2 3 4 5:dbus S:01:2 3 4 5:dhcpcd S:01:2 3 4 5:cgroup-bin S:01:S:mountkernfs.sh S:01:S:fake-hwclock S:03:3 4 5:lightdm S:16:S:x11-common S:14:S:kbd S:01:2 3 4 5:ifplugd S:02:1:single S:01:1:killprocs S:01:1 2 3 4 5:bootlogs S:01:S:hostname.sh S:01:1 2 3 4 5:motd S:02:2 3 4 5:dphys-swapfile S:04:2 3 4 5:rc.local S:04:2 3 4 5:rmnologin S:02:2 3 4 5:cron S:02:2 3 4 5:rsync S:02:2 3 4 5:ssh S:02:2 3 4 5:ntp S:01:2 3 4 5:sudo S:16:S:raspi-config S:10:S:udev-mtab S:06:S:checkroot-bootclean.sh S:16:S:bootmisc.sh S:06:S:kmod S:16:S:plymouth-log S:07:S:checkfs.sh S:06:S:mtab.sh S:10:S:procps
ほほー、なるほど、コレは多分、左から現状(StartかKillか)、起動順、起動すべきRun-Levelのリスト、サービス名、だろうなあ。はて、S、Kじゃないほうの、Run-Levelの「S」は、なんだろ、と調べると、「起動順で一番はじめ、かつ、どのRun-Levelでも共通で起動」ということのようである。
で、
# insserv -s | egrep '(pache)|(ttp)' #
なんてことをやっても、全然何も出ないから、デフォルトのRaspbianではhttpらしきものやApacheらしきものは何も動いていない。
それでは、というわけで、
# apt-get -s install apache2 パッケージリストを読み込んでいます... 完了 依存関係ツリーを作成しています 状態情報を読み取っています... 完了 以下の特別パッケージがインストールされます: apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert 提案パッケージ: apache2-doc apache2-suexec apache2-suexec-custom openssl-blacklist 以下のパッケージが新たにインストールされます: apache2 apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert アップグレード: 0 個、新規インストール: 10 個、削除: 0 個、保留: 0 個。 Inst libapr1 (1.4.6-3+deb7u1 Raspbian:7.0/oldstable [armhf]) Inst libaprutil1 (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Inst libaprutil1-dbd-sqlite3 (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Inst libaprutil1-ldap (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Inst apache2.2-bin (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst apache2-utils (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst apache2.2-common (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst apache2-mpm-worker (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst apache2 (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst ssl-cert (1.0.32 Raspbian:7.0/oldstable [all]) Conf libapr1 (1.4.6-3+deb7u1 Raspbian:7.0/oldstable [armhf]) Conf libaprutil1 (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Conf libaprutil1-dbd-sqlite3 (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Conf libaprutil1-ldap (1.4.1-3 Raspbian:7.0/oldstable [armhf]) Conf apache2.2-bin (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf apache2-utils (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf apache2.2-common (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf apache2-mpm-worker (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf apache2 (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf ssl-cert (1.0.32 Raspbian:7.0/oldstable [all]) #
特に問題なさそうだな、というわけで……
# apt-get install apache2 パッケージリストを読み込んでいます... 完了 依存関係ツリーを作成しています 状態情報を読み取っています... 完了 以下の特別パッケージがインストールされます: apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert 提案パッケージ: apache2-doc apache2-suexec apache2-suexec-custom openssl-blacklist 以下のパッケージが新たにインストールされます: apache2 apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert アップグレード: 0 個、新規インストール: 10 個、削除: 0 個、保留: 0 個。 1,356 kB のアーカイブを取得する必要があります。 この操作後に追加で 4,585 kB のディスク容量が消費されます。 続行しますか [Y/n]? y 取得:1 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libapr1 armhf 1.4.6-3+deb7u1 [90.9 kB] 取得:2 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1 armhf 1.4.1-3 [77.1 kB] 取得:3 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1-dbd-sqlite3 armhf 1.4.1-3 [17.2 kB] 取得:4 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1-ldap armhf 1.4.1-3 [16.0 kB] 取得:5 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2.2-bin armhf 2.2.22-13+deb7u6 [676 kB] 取得:6 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-utils armhf 2.2.22-13+deb7u6 [163 kB] 取得:7 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2.2-common armhf 2.2.22-13+deb7u6 [292 kB] 取得:8 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-mpm-worker armhf 2.2.22-13+deb7u6 [2,238 B] 取得:9 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2 armhf 2.2.22-13+deb7u6 [1,440 B] 取得:10 http://mirrordirector.raspbian.org/raspbian/ wheezy/main ssl-cert all 1.0.32 [19.5 kB] 1,356 kB を 4秒 で取得しました (281 kB/s) パッケージを事前設定しています ... 以前に未選択のパッケージ libapr1 を選択しています。 (データベースを読み込んでいます ... 現在 78616 個のファイルとディレクトリがインストールされています。) (.../libapr1_1.4.6-3+deb7u1_armhf.deb から) libapr1 を展開しています... 以前に未選択のパッケージ libaprutil1 を選択しています。 (.../libaprutil1_1.4.1-3_armhf.deb から) libaprutil1 を展開しています... 以前に未選択のパッケージ libaprutil1-dbd-sqlite3 を選択しています。 (.../libaprutil1-dbd-sqlite3_1.4.1-3_armhf.deb から) libaprutil1-dbd-sqlite3 を展開しています... 以前に未選択のパッケージ libaprutil1-ldap を選択しています。 (.../libaprutil1-ldap_1.4.1-3_armhf.deb から) libaprutil1-ldap を展開しています... 以前に未選択のパッケージ apache2.2-bin を選択しています。 (.../apache2.2-bin_2.2.22-13+deb7u6_armhf.deb から) apache2.2-bin を展開しています... 以前に未選択のパッケージ apache2-utils を選択しています。 (.../apache2-utils_2.2.22-13+deb7u6_armhf.deb から) apache2-utils を展開しています... 以前に未選択のパッケージ apache2.2-common を選択しています。 (.../apache2.2-common_2.2.22-13+deb7u6_armhf.deb から) apache2.2-common を展開しています... 以前に未選択のパッケージ apache2-mpm-worker を選択しています。 (.../apache2-mpm-worker_2.2.22-13+deb7u6_armhf.deb から) apache2-mpm-worker を展開していま す... 以前に未選択のパッケージ apache2 を選択しています。 (.../apache2_2.2.22-13+deb7u6_armhf.deb から) apache2 を展開しています... 以前に未選択のパッケージ ssl-cert を選択しています。 (.../ssl-cert_1.0.32_all.deb から) ssl-cert を展開しています... man-db のトリガを処理しています ... libapr1 (1.4.6-3+deb7u1) を設定しています ... libaprutil1 (1.4.1-3) を設定しています ... libaprutil1-dbd-sqlite3 (1.4.1-3) を設定しています ... libaprutil1-ldap (1.4.1-3) を設定しています ... apache2.2-bin (2.2.22-13+deb7u6) を設定しています ... apache2-utils (2.2.22-13+deb7u6) を設定しています ... apache2.2-common (2.2.22-13+deb7u6) を設定しています ... Enabling site default. Enabling module alias. Enabling module autoindex. Enabling module dir. Enabling module env. Enabling module mime. Enabling module negotiation. Enabling module setenvif. Enabling module status. Enabling module auth_basic. Enabling module deflate. Enabling module authz_default. Enabling module authz_user. Enabling module authz_groupfile. Enabling module authn_file. Enabling module authz_host. Enabling module reqtimeout. apache2-mpm-worker (2.2.22-13+deb7u6) を設定しています ... [....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName . ok apache2 (2.2.22-13+deb7u6) を設定しています ... ssl-cert (1.0.32) を設定しています ... #
なんてことなく終わる。
次に、
# insserv -s | egrep '(pache)|(ttp)' K:01:0 1 6:apache2 S:02:2 3 4 5:apache2 #
……ぬぅ、StartなのかKillなのか、どっちやねん、というわけで、ブラウザにアドレスを入れてみると、

……と、普通にApacheは動いている。KとS両方出るのは、起動順が01、02となっていることから、Run-Level 0、1、6ではどうあろうと強制終了し、改めて2、3、4、5では起動、ということであろうか。
えーっと、自動起動のほうはこれでいいから、サービスの起動停止のテストは……、と。
# /etc/init.d/apache2 stop [....] Stopping web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName [ ok waiting .. root@satoraspi:~# /etc/init.d/apache2 start [....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName . ok #
ふむ、だいだい動いとる。
とりあえず、indexだけ、かっこよくしておこう。えーっと、ドキュメントルートはどこかいな、と。
# ls -Fla /etc/ | egrep '(http)|(apache)' drwxr-xr-x 7 root root 4096 8月 30 09:01 apache2/ root@satoraspi:~# ls /etc/apache2 apache2.conf envvars mods-available ports.conf sites-enabled conf.d magic mods-enabled sites-available # cd /etc/apache2 # grep 'DocumentRoot' */* sites-available/default: DocumentRoot /var/www sites-available/default-ssl: DocumentRoot /var/www sites-enabled/000-default: DocumentRoot /var/www
……と、いうわけで普通に「/var/www」の下じゃのう。普通のユーザに戻って、
toshio@satoraspi:~$ cd /var/www toshio@satoraspi:/var/www$ ls -Fla 合計 12 drwxr-xr-x 2 root root 4096 8月 30 09:01 ./ drwxr-xr-x 12 root root 4096 8月 30 09:01 ../ -rw-r--r-- 1 root root 177 8月 30 09:01 index.html toshio@satoraspi:/var/www$ cat index.html <html><body><h1>It works!</h1> <p>This is the default web page for this server.</p> <p>The web server software is running but no content has been added, yet.</p> </body></html>toshio@satoraspi:/var/www$
はあ、さっきブラウザに出てたヤツでんな、と。
一応残しておいて……
toshio@satoraspi:/var/www$ sudo cp index.html .index.html.ORG [sudo] password for toshio: toshio@satoraspi:/var/www$ sudo chown toshio:pi index.html toshio@satoraspi:/var/www$ ls -Fla 合計 16 drwxr-xr-x 2 root root 4096 8月 30 09:37 ./ drwxr-xr-x 12 root root 4096 8月 30 09:01 ../ -rw-r--r-- 1 root root 177 8月 30 09:37 .index.html.ORG -rw-r--r-- 1 toshio pi 177 8月 30 09:01 index.html toshio@satoraspi:/var/www$cd .. toshio@satoraspi:/var$sudo chown toshio:pi www toshio@satoraspi:/var$cd www toshio@satoraspi:/var/www$vi index.html
んで、ばーっ、って、書くですよ。
<html>
<head>
<meta name="Editor" content="vim">
<meta http-equiv="Content-Type" content="text/html;charset=utf-8">
<link rel="icon" href="favicon.ico" type="image/x-icon" />
<link rel="Shortcut Icon" type="image/x-icon" href="favicon.ico" />
<title>おっさん用Raspberry Pi 2 Model B</title>
<meta http-equiv="Keyword" content="佐藤俊夫, 佐藤, 俊夫, SATOTOSHIO, SatoToshio, sato, toshio, Raspberry Pi, Raspberry Pi 2 Model B">
</head>
<body bgcolor="#888888">
<basefont size=4">
<center>
<table>
<tr>
<td>
<h1>おっさん用Raspberry Pi 2 Model B</h1>
<hr>
<center><img src="raspberry_pi.png"></center>
</td>
</tr>
<tr>
<td>
とりあえずまだ何もない。
</td>
</tr>
</table>
</center>
</body>
</html>
んで、画像なんかをSCPでコピーして、まずはこんなindex.htmlですな。
それにしても、こんな、5千円かそこらのシングルボードでapache2のウェブサービスができるなんて、隔世の感があるな。
さておき、続いてPHPを入れよう。
toshio@satoraspi:/var/www$ cd toshio@satoraspi:~$ su - パスワード: root@satoraspi:~# apt-cache search php5 dwoo - PHP5 template engine libapache2-mod-php5 - server-side, HTML-embedded scripting language (Apache 2 module) libapache2-mod-php5filter - server-side, HTML-embedded scripting language (apache 2 filter module) libexpect-php5 - expect module for PHP 5 libgv-php5 - PHP5 bindings for graphviz libkohana2-modules-php - lightweight PHP5 MVC framework (extension modules) libkohana2-php - lightweight PHP5 MVC framework libkohana3.1-core-php - PHP5 framework core classes libkohana3.1-php - PHP5 framework metapackage libkohana3.2-core-php - PHP5 framework core classes libkohana3.2-php - PHP5 framework metapackage libow-php5 - Dallas 1-wire support: PHP5 bindings libphp-jpgraph - Object oriented graph library for php5 libphp-jpgraph-examples - Object oriented graph library for php5 (examples) libphp5-embed - HTML-embedded scripting language (Embedded SAPI library) php-doc - Documentation for PHP5 php-imlib - PHP Imlib2 Extension php5 - server-side, HTML-embedded scripting language (metapackage) php5-adodb - Extension optimising the ADOdb database abstraction library php5-cgi - server-side, HTML-embedded scripting language (CGI binary) php5-cli - command-line interpreter for the php5 scripting language php5-common - Common files for packages built from the php5 source php5-curl - CURL module for php5 php5-dbg - Debug symbols for PHP5 php5-dev - Files for PHP5 module development php5-enchant - Enchant module for php5 php5-exactimage - fast image manipulation library (PHP bindings) php5-ffmpeg - audio and video support via ffmpeg for php5 php5-fpm - server-side, HTML-embedded scripting language (FPM-CGI binary) php5-gd - GD module for php5 php5-gdcm - Grassroots DICOM PHP5 bindings php5-geoip - GeoIP module for php5 php5-gmp - GMP module for php5 php5-imagick - ImageMagick module for php5 php5-imap - IMAP module for php5 php5-interbase - interbase/firebird module for php5 php5-intl - internationalisation module for php5 php5-lasso - Library for Liberty Alliance and SAML protocols - PHP 5 bindings php5-ldap - LDAP module for php5 php5-librdf - PHP5 language bindings for the Redland RDF library php5-mapscript - php5-cgi module for MapServer php5-mcrypt - MCrypt module for php5 php5-memcache - memcache extension module for PHP5 php5-memcached - memcached extension module for PHP5, uses libmemcached php5-midgard2 - Midgard2 Content Repository - PHP5 language bindings and module php5-ming - Ming module for php5 php5-mysql - MySQL module for php5 php5-mysqlnd - MySQL module for php5 (Native Driver) php5-odbc - ODBC module for php5 php5-pgsql - PostgreSQL module for php5 php5-ps - ps module for PHP 5 php5-pspell - pspell module for php5 php5-radius - PECL radius module for PHP 5 php5-recode - recode module for php5 php5-remctl - PECL module for Kerberos-authenticated command execution php5-rrd - rrd module for PHP 5 php5-sasl - Cyrus SASL extension for PHP 5 php5-snmp - SNMP module for php5 php5-sqlite - SQLite module for php5 php5-svn - PHP Bindings for the Subversion Revision control system php5-sybase - Sybase / MS SQL Server module for php5 php5-tidy - tidy module for php5 php5-tokyo-tyrant - PHP interface to Tokyo Cabinet's network interface, Tokyo Tyrant php5-vtkgdcm - Grassroots DICOM VTK PHP bindings php5-xcache - Fast, stable PHP opcode cacher php5-xdebug - Xdebug Module for PHP 5 php5-xmlrpc - XML-RPC module for php5 php5-xsl - XSL module for php5 phpunit - Unit testing suite for PHP5 root@satoraspi:~#
はあ、いっぱい出たけど、要するにPHP5があるんだよな。うん、うん。
root@satoraspi:~# apt-get -s install php5 パッケージリストを読み込んでいます... 完了 依存関係ツリーを作成しています 状態情報を読み取っています... 完了 以下の特別パッケージがインストールされます: apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5-cli php5-common 提案パッケージ: php-pear 以下のパッケージは「削除」されます: apache2-mpm-worker 以下のパッケージが新たにインストールされます: apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5 php5-cli php5-common アップグレード: 0 個、新規インストール: 8 個、削除: 1 個、保留: 0 個。 Remv apache2-mpm-worker [2.2.22-13+deb7u6] [apache2:armhf ] Inst apache2-mpm-prefork (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Conf apache2-mpm-prefork (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf]) Inst lsof (4.86+dfsg-1 Raspbian:7.0/oldstable [armhf]) Inst php5-common (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) Inst libonig2 (5.9.1-1 Raspbian:7.0/oldstable [armhf]) Inst libqdbm14 (1.8.78-2 Raspbian:7.0/oldstable [armhf]) Inst libapache2-mod-php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) Inst php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [all]) Inst php5-cli (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) Conf lsof (4.86+dfsg-1 Raspbian:7.0/oldstable [armhf]) Conf php5-common (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) Conf libonig2 (5.9.1-1 Raspbian:7.0/oldstable [armhf]) Conf libqdbm14 (1.8.78-2 Raspbian:7.0/oldstable [armhf]) Conf libapache2-mod-php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) Conf php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [all]) Conf php5-cli (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf]) root@satoraspi:~#
入れても大丈夫みたいだ。
root@satoraspi:~# apt-get install php5 パッケージリストを読み込んでいます... 完了 依存関係ツリーを作成しています 状態情報を読み取っています... 完了 以下の特別パッケージがインストールされます: apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5-cli php5-common 提案パッケージ: php-pear 以下のパッケージは「削除」されます: apache2-mpm-worker 以下のパッケージが新たにインストールされます: apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5 php5-cli php5-common アップグレード: 0 個、新規インストール: 8 個、削除: 1 個、保留: 0 個。 6,142 kB のアーカイブを取得する必要があります。 この操作後に追加で 17.3 MB のディスク容量が消費されます。 続行しますか [Y/n]? y 取得:1 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-mpm-prefork armhf 2.2.22-13+deb7u6 [2,342 B] 取得:2 http://mirrordirector.raspbian.org/raspbian/ wheezy/main lsof armhf 4.86+dfsg-1 [321 kB] 取得:3 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5-common armhf 5.4.44-0+deb7u1 [621 kB] 取得:4 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libonig2 armhf 5.9.1-1 [130 kB] 取得:5 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libqdbm14 armhf 1.8.78-2 [119 kB] 取得:6 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libapache2-mod-php5 armhf 5.4.44-0+deb7u1 [2,479 kB] 取得:7 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5 all 5.4.44-0+deb7u1 [1,024 B] 取得:8 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5-cli armhf 5.4.44-0+deb7u1 [2,469 kB] 6,142 kB を 6秒 で取得しました (1,016 kB/s) dpkg: apache2-mpm-worker: 依存関係に問題があります。しかし要求に従い削除しています: apache2 は以下に依存 (depends) します: apache2-mpm-worker (= 2.2.22-13+deb7u6) | apache2-mpm-prefork (= 2.2.22-13+deb7u6) | apache2-mpm-event (= 2.2.22-13+deb7u6) | apache2-mpm-itk (= 2.2.22-13+deb7u6) ...しかし: パッケージ apache2-mpm-worker は削除されようとしています。 パッケージ apache2-mpm-prefork はまだインストールされていません。 パッケージ apache2-mpm-event はまだインストールされていません。 パッケージ apache2-mpm-itk はまだインストールされていません。 (データベースを読み込んでいます ... 現在 79208 個のファイルとディレクトリがインストールされています。) apache2-mpm-worker を削除しています ... [....] Stopping web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName [ ok waiting .. 以前に未選択のパッケージ apache2-mpm-prefork を選択しています。 (データベースを読み込んでいます ... 現在 79203 個のファイルとディレクトリがインストールされています。) (.../apache2-mpm-prefork_2.2.22-13+deb7u6_armhf.deb から) apache2-mpm-prefork を展開してい ます... apache2-mpm-prefork (2.2.22-13+deb7u6) を設定しています ... [....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName . ok 以前に未選択のパッケージ lsof を選択しています。 (データベースを読み込んでいます ... 現在 79208 個のファイルとディレクトリがインストールされています。) (.../lsof_4.86+dfsg-1_armhf.deb から) lsof を展開しています... 以前に未選択のパッケージ php5-common を選択しています。 (.../php5-common_5.4.44-0+deb7u1_armhf.deb から) php5-common を展開しています... 以前に未選択のパッケージ libonig2 を選択しています。 (.../libonig2_5.9.1-1_armhf.deb から) libonig2 を展開しています... 以前に未選択のパッケージ libqdbm14 を選択しています。 (.../libqdbm14_1.8.78-2_armhf.deb から) libqdbm14 を展開しています... 以前に未選択のパッケージ libapache2-mod-php5 を選択しています。 (.../libapache2-mod-php5_5.4.44-0+deb7u1_armhf.deb から) libapache2-mod-php5 を展開しています... 以前に未選択のパッケージ php5 を選択しています。 (.../php5_5.4.44-0+deb7u1_all.deb から) php5 を展開しています... 以前に未選択のパッケージ php5-cli を選択しています。 (.../php5-cli_5.4.44-0+deb7u1_armhf.deb から) php5-cli を展開しています... man-db のトリガを処理しています ... lsof (4.86+dfsg-1) を設定しています ... php5-common (5.4.44-0+deb7u1) を設定しています ... Creating config file /etc/php5/mods-available/pdo.ini with new version libonig2 (5.9.1-1) を設定しています ... libqdbm14 (1.8.78-2) を設定しています ... libapache2-mod-php5 (5.4.44-0+deb7u1) を設定しています ... Creating config file /etc/php5/apache2/php.ini with new version [....] Restarting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName ... waiting apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName . ok php5 (5.4.44-0+deb7u1) を設定しています ... php5-cli (5.4.44-0+deb7u1) を設定しています ... Creating config file /etc/php5/cli/php.ini with new version update-alternatives: /usr/bin/php (php) を提供するために 自動モード で /usr/bin/php5 を使います root@satoraspi:~#
……と、いうわけで、サクッと入る。
それでは早速……。
root@satoraspi:/var/www# ログアウト toshio@satoraspi:~$ cd /var/www toshio@satoraspi:/var/www$ vi infotest.php
で、中身はこじんまりとこう書いて……
<html> <head></head> <body> <?phpinfo();?> </body> </html>
早速ブラウザで見ると……
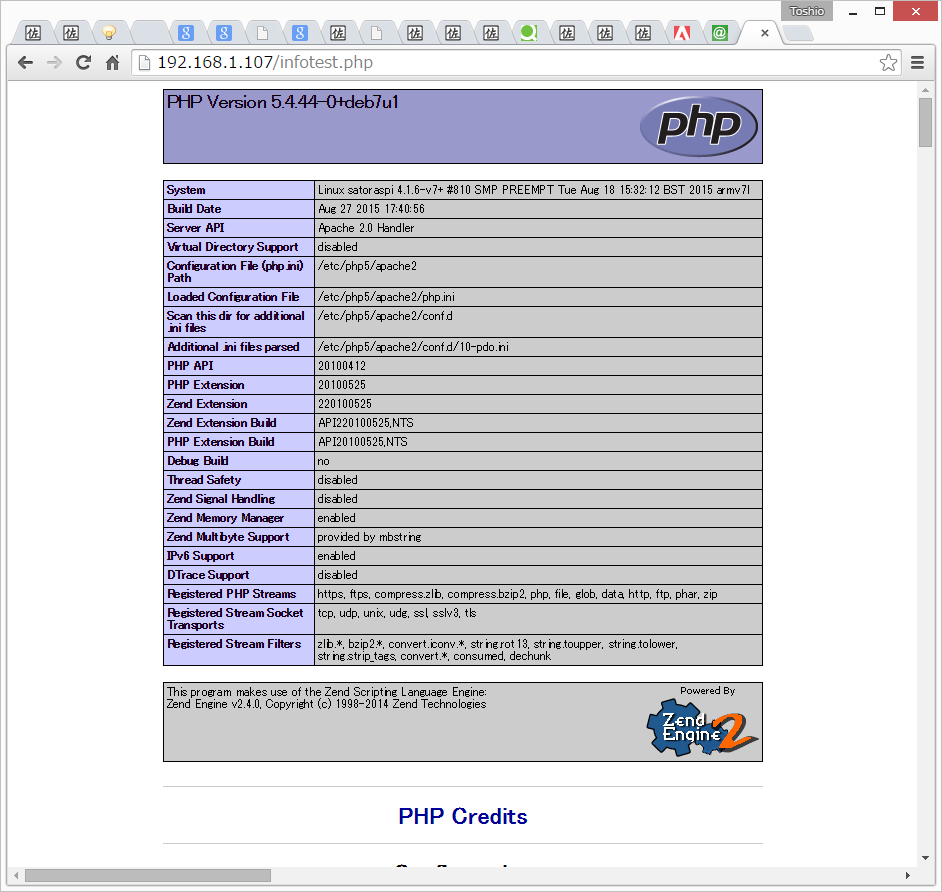
うん。動いちょる動いちょる。
さて、次に、phpからGPIOだな。マンネリだけどやっぱり「Lチカ」か。
「web2LED.php」
<html>
<head>
<meta name="Editor" content="vim">
<meta http-equiv="Content-Type" content="text/html;charset=utf-8">
<link rel="icon" href="favicon.ico" type="image/x-icon" />
<link rel="Shortcut Icon" type="image/x-icon" href="favicon.ico" />
<title>PHPでLチカ</title>
<meta http-equiv="Keyword" content="佐藤俊夫, 佐藤, 俊夫, SATOTOSHIO, SatoToshio, sato, toshio, Raspberry Pi, Raspberry Pi 2 Model B">
</head>
<body bgcolor="#888888">
<body>
<center>
<h1>PHPでLチカ</h1>
<hr>
<form method="POST">
<input type="submit" name="on" value="LED on"><br>
<input type="submit" name="off" value="LED off">
</form>
</center>
<?
ini_set( 'display_errors', 1 );
file_put_contents('/sys/class/gpio/export', 17);
file_put_contents('/sys/class/gpio/gpio17/direction', 'out');
if(isset($_POST['on'])){
file_put_contents('/sys/class/gpio/gpio17/value', 1);
print("LED ON.");
}elseif(isset($_POST['off'])){
file_put_contents('/sys/class/gpio/gpio17/value', 0);
print("LED OFF.");
}
file_put_contents('/sys/class/gpio/unexport', 17);
?>
</body>
</html>
ブレッドボードにLEDと330Ωの抵抗を直列につけて、17番ピンとアースにつなぐ。
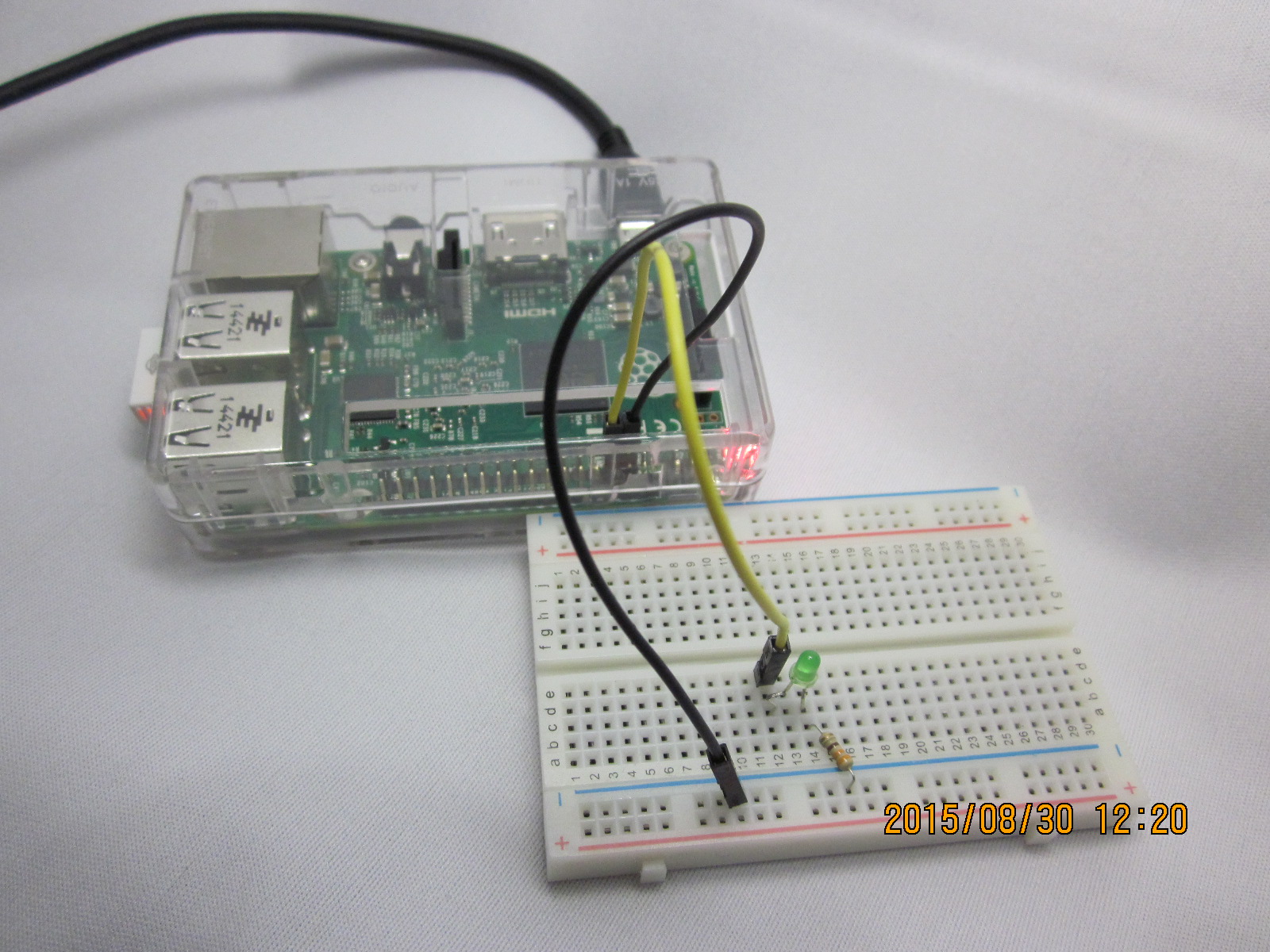
で、こういうフォームになるのだが……

いや、そりゃまあ、動くわけないわな、GPIOはrootでなきゃ読み書きできんのだから。
えーっと、どうやったらいいかな、ということで、
……などと、いろいろあるが、どうも、どれもいまいち、ピンと来ないな……。
まあ、GPIOのアクセスをヌルくする、これかなあ……。
toshio@satoraspi:~$ cd /sys/class toshio@satoraspi:/sys/class$ su パスワード: root@satoraspi:/sys/class# chmod -R 777 gpio root@satoraspi:/sys/class# ls -Flad gpio drwxrwxrwx 2 root gpio 0 8月 30 13:20 gpio/ root@satoraspi:/sys/class#
なんっか、もう、力いっぱい777丸出しですけどね(笑)。多分、700とか760でも大丈夫じゃないかなあ。試してないけど。
で、まあ、これで、フォームをクリックするとLEDが点いたり消えたりする。
これをそのまま、いつぞやArduinoでやったSSR(ソリッド・ステート・リレー)につなぐと、家電製品のオン・オフなどができるわけだ。

では、やってみよう。
真ん中の黒い箱がSSRだ。Arduinoは5V、Raspberry Pi 2は3.3Vで電圧が違うが、このSSRは3Vから8Vまでの入力を受け付けるので、大丈夫なのである。
そういえばまだアレをやっていなかったな、と思いつく。
まだやっていなかったな、というのは正確ではない。やるのは30年ぶりくらいかな、というと正確だ。
アレ、というのは「マルチバイブレータ」という回路のことだ。
そう、この「マルチバイブレータ」という回路ををもとに少しづつカスタマイズを進めていくと「2安定マルチバイブレータ」、つまり「フリップフロップ」になり、それはそのまま1ビット記憶素子となり、やがてコンピュータそのものにつながっていくのである。
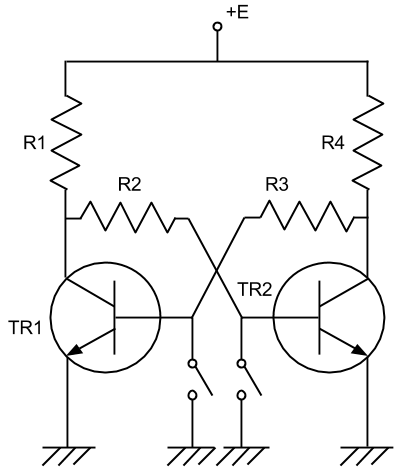
その原点の、「マルチバイブレータ」というのは下のような回路である。
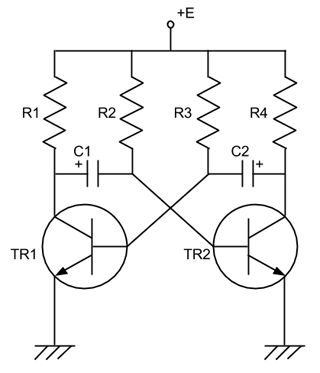
私などは若い頃、職場でこの回路を随分と叩き込まれたもので、当時は二つのトランジスタのところが真空管になっている回路がさまざまな機材の中にまだ現役で存在した。真空管でマルチバイブレータを構成する場合はヒータ回路などを一緒に考えなくてはならないことや、電圧が高いことなどで、実際に作動させるにはもう少し複雑な配慮が必要になる。その点、トランジスタで構成すると電力も少なくてすみ、単純明瞭だ。
回路自体の知財権等がどうなっているか、ということを今日まで知らなかったが、今ネットで少し検索してみると、Wikipediaには「イギリス人の物理学者ウィリアム・エックルスとフランク・ジョーダンによって1919年に作られた」とある。ウィリアム・エックルスは1966年に亡くなっているが、フランク・ジョーダンの没年は不明である。電子回路の知財権に関して、著作権はあいまいでよくわからないが、回路配置利用権については、日本では申請登録が必要で、かつ登録後10年となっている。要するにマルチバイブレータの回路図をネットでコピーしたり利用したりする場合の知財権関係の問題点は、回路配置利用権については申請されていないから存在しないが、著作権についてははっきりせず、よくわからないということである。しかし、マルチバイブレータの回路図は、あらゆる教科書に作成者の紹介もなく掲載されているので、多分ネットに書いても大丈夫なのではなかろうか。
さておき、この回路の動作原理は複雑で、理解するのは困難だが、動作結果や回路自体はご覧のように簡単なので、すぐに覚えてしまえる。すなわち、一方のトランジスタのベースをもう一方のトランジスタのコレクタにコンデンサをはさんで「たすき掛け」に接続し、それぞれの接続点に抵抗を全部で4つつなぎ、これを介して電源電圧を加え、最後にエミッタを接地する……、というふうに覚えるのだ。
発振周期の計算は私は恥ずかしながら覚えていない。しかし、ネットを漁ると、

……と、すぐにその式は出てくる。つまり、コンデンサふたつと、真ん中の抵抗ふたつで周期が決まる。両側の抵抗ふたつはトランジスタに流す電流を決めると思えばよい。この両側二つの抵抗をLEDの電流調整抵抗とみなせば、LEDはここに直列につなげばよい。
2秒に1回くらい、つまり0.5HzくらいでLEDをチカチカさせる場合を考える。とりあえず手持ちの部品で47μFの電解コンデンサがいくつかあるのでそれを使いたい。左右とも同じ周期で発振させるなら、この場合はR2とR3、C1とC2は同じ容量のものを使えばよい。なので、先ほどの式は

……というふうに簡単になる。
手持ちの電解コンデンサ47μFで、0.5HzくらいのLチカをやりたいときの抵抗は、

……というふうになる。
私のガラクタ箱の中に入っている一番近い値の抵抗は、10kΩだ。代わりにこれを使うと、結局、

……というわけで、2秒に3回くらいチカチカするものが作れる。
とりあえず、C1とC4、つまり両側の電流調整用には330ΩとLEDを直列に入れる。
適当なトランジスタがないので、買う。NPN型の定番品に2SC1815というのがあり、秋葉原千石電商で10個入りのパケットが150円だ。

この「2SC1815」は汎用的に使われている石なので、さまざまな電子工作にもよく登場している。余分に持っていて損はないし、10個で150円ならお金を使った気にすらならないので、一袋買っておくのは正解だと思う。
ブレッドボードに並べれば、次のようになる。
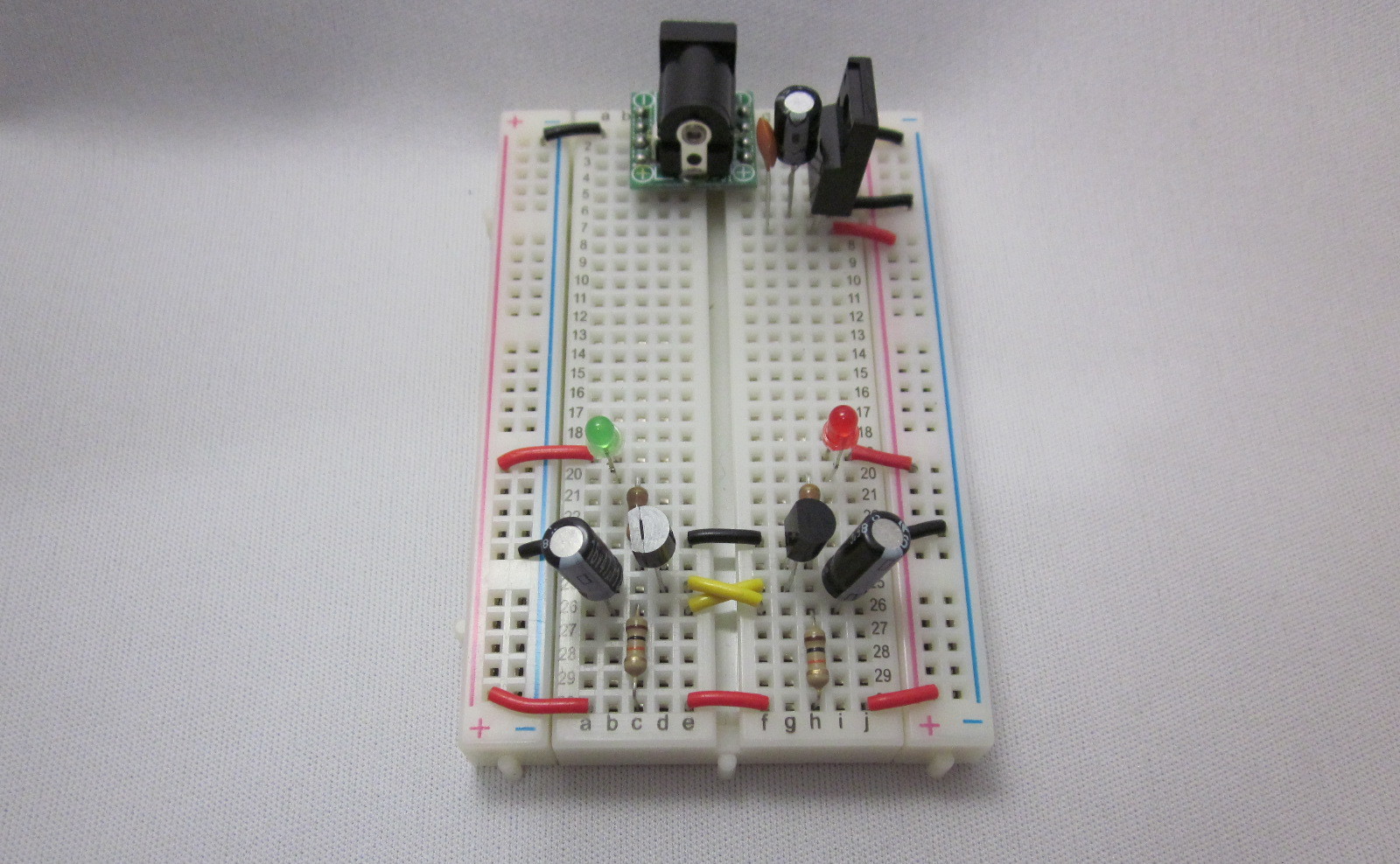
上のほうに3端子レギュレータを設け、ACアダプタの13Vを5Vに落としている。切り欠きのあるトランジスタふたつ、切り欠きに向かって左からエミッタ・コレクタ・ベースなので、――昔はこれを「E-C-B」とも「エ・ク・ボ」とも覚えたものであった――ベースから黄色いジャンパで「たすき掛け」になっているところがよくわかる。R1・R4が下のほうの抵抗で、茶・黒・橙(1・0・3、10×10の3乗)の10kΩであることが見て取れる。
動かすとこんな感じである。
次に、この「Lチカ周波数」をできるだけ正確に測ってみよう。私はオシロスコープなど持っていない。そこで、LEDの電流調整抵抗の後に直列にArduinoのデジタル入力をつなぎ、LOW~LOWの間をμ秒単位で計れば、周波数がわかるわけだ。電源も5Vなので、ちょうどよい。
スケッチをこのように書き……
// // MB2f.ino // 非安定マルチバイブレータの周波数を測る。 // 27.08.23(日) 1400~ // 佐藤俊夫 // #include <stdio.h> // const int MB = 2; // デジタル2番ピン // void setup() { pinMode(MB, INPUT); Serial.begin(9600); } void loop() { static unsigned long int prevtime = 0; static int prevstatus = HIGH; int nowstatus = digitalRead(MB); if(nowstatus != prevstatus){ if(nowstatus == LOW){ unsigned long int time = micros() - prevtime; float f = 1000000.0 / (time); char s[32], sf[32]; sprintf(s, "t = %ld microsec, f = %sHz", time, dtostrf(f, 5, 3, sf)); Serial.println(s); prevtime = micros(); } prevstatus = nowstatus; } }
それから、このように繋ぐ。
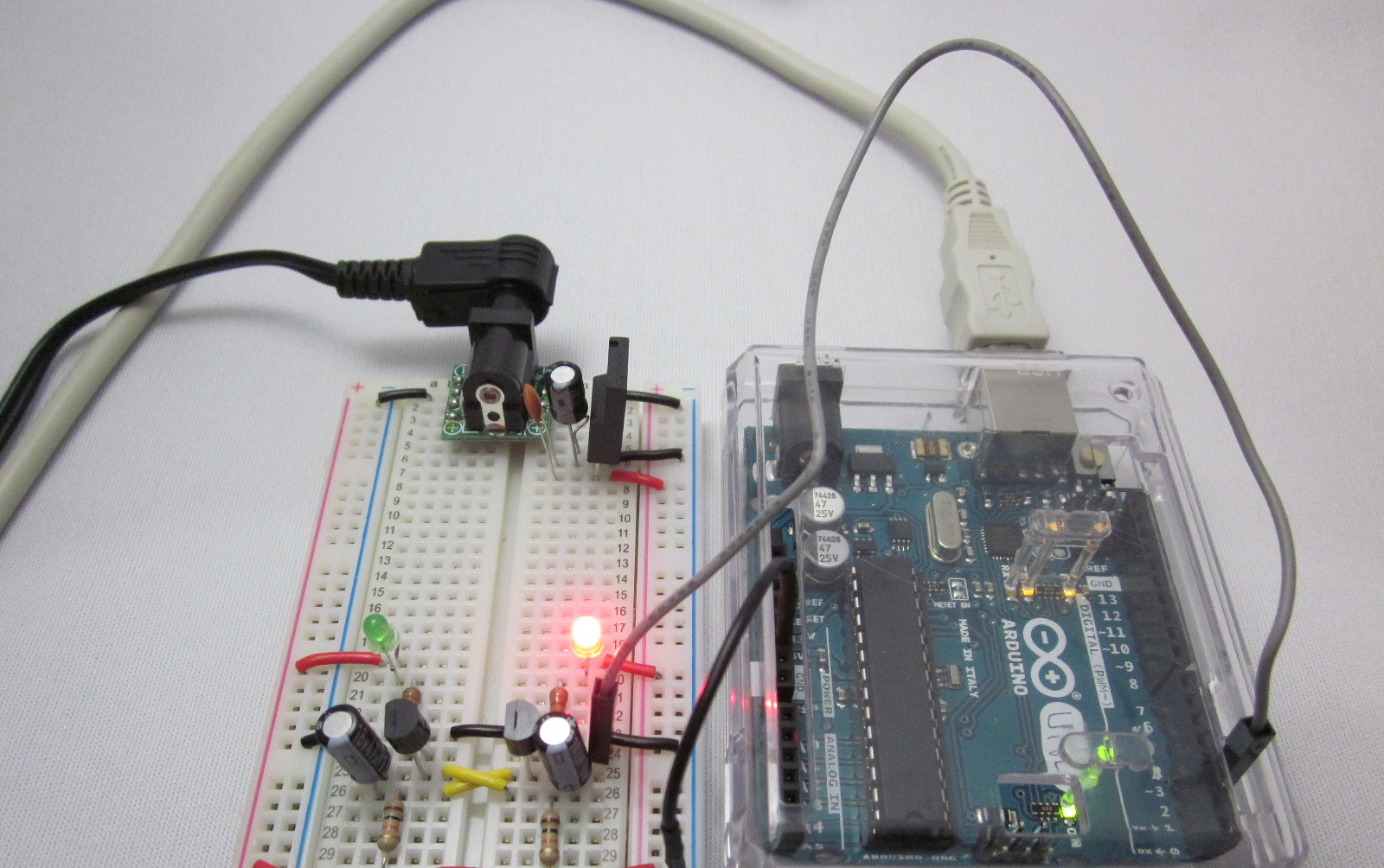
Arduinoのシリアルモニタで観測すると、波長から周波数が計算されてくる。

2.062Hzとなっているから、最初の計算の1.5Hzからすると、だいぶ誤差があるが、CR回路の発振なんて、こんなもんである。
さて、この「非安定マルチバイブレータ」は、回路にコンデンサが含まれていることにミソがある。ふたつのコンデンサが入っているからその充放電の働きにより発振し、放っておいても時間ごとに切り替わるのである。
そこでこのコンデンサをとっぱらい、少し回路の配置を変える。
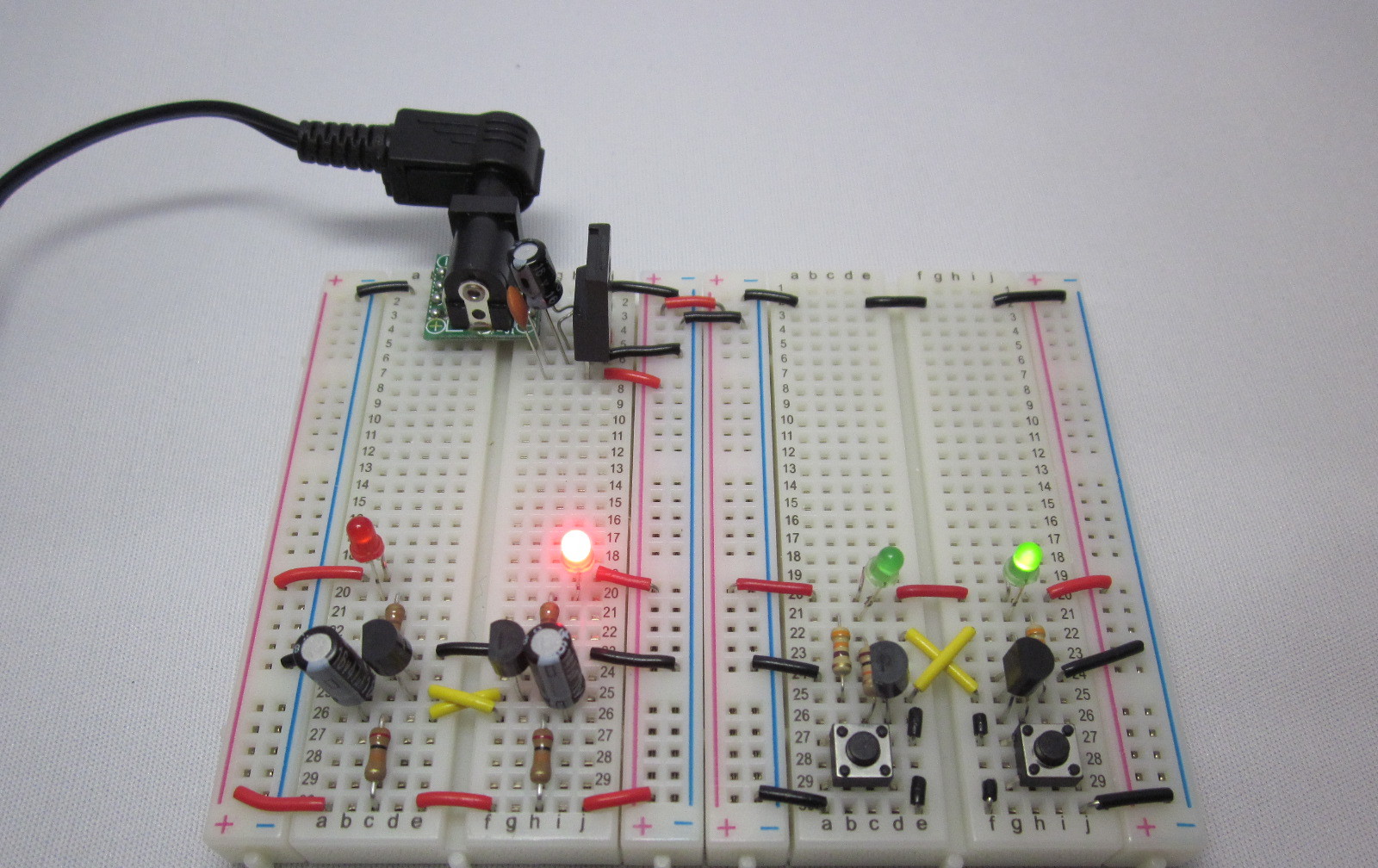
そうするとアラ不思議、状態を保持する1ビットの記憶素子、「フリップフロップ」になるのである。
この場合、トランジスタのベースから出したスイッチを押すたび、状態が切り替わる。
ブレッドボードに組むとこうなる。
動かしている様子である。
ボタンを操作するたび、光っているLEDが代わる。二つの状態のいずれかを保持しているということであり、それが1ビットの記憶ということである。2安定マルチバイブレータが1ビットのメモリーだということがここからもわかる。
Raspberry PiのGPIOに何かをつなごうとして、何の用意もしていないと戸惑うのが、
「Raspberry PiのGPIO端子は、オスだ」
……ということかも知れない。
Raspberry Piの端子は、2.54mmピッチのピンヘッダだ。このピンヘッダには、2550、あるいはQIとも言われるコネクタを使うと接続することができる。

上の写真はそのQIコネクタ類だが、それで言えば、一番左のメスの端子を切り外し、適切な電線に圧着してハウジングを取り付ければ、それをRaspberry Piに接続できるようになる。
ところが、どうもこの「QIコネクタ」、情報が少ない。作り方にも多少のコツがある。それで、私が書こうか、と思ったら、既に詳しく紹介されているサイトがあった。
もう、このサイトが書いておられること以上には付け加えることなどないが、工具については、5年前に私のブログでも紹介しているので、参考にする方がいるならお役立ていただきたい。エントリは5年前のものだが、昨日(平成27年8月15日(土))千石電商本店の1階に立ち寄ったところ、まったく同じ工具がほぼ同じ値段で売られていたことを付け加えておきたい。
私のエントリで紹介している工具は、大西工業株式会社の「No.150 MINI クリンピングプライヤー」である。この工具を使う場合は、一番手前の「AWG22・0.3mm^2」のダイスで導線をかしめ、被覆は一つ隣の「20・0.5」のダイスで半分だけかしめて、残りを普通のラジオペンチで締めあげるとよい。

私のエントリでも触れている通り、QIコネクタは、Raspberry Piや電子工作だけではなく、PCの内部など、いろいろなところで使われている規格なので、覚えておけば何か修理や改造の必要に迫られたときに役立つと思う。
QIコネクタやそのハウジングは、秋葉原千石電商本店なら、入り口から見て左側の、一番奥より少し手前の小さい抽斗の中段くらいに入っている。
5年前当時は、使い方が良く分からなかったので、レジの店員さんに「このコネクタ、カシめ方と、使う工具を教えてもらえませんでしょうか」と頼んだら、得たりとばかりの落ち着いた態度で、実際の使い方とコツ、注意点を、店のディスプレイ用にとっておいてある端子だと思うが、それで実演してくれたものであった。若い店員さんだったが、その該博な知識と技に驚嘆したものであった。
先日、八潮の秋月電子の初老の店員さんは、「これにハウジングみたいなモンは存在しませんよ」と言っていたが、千石電商にはあるので、秋月に行って見つからなければ、千石電商で買うとよいと思う。
私も、秋月電子八潮店で、「いや、ありますよ」と店員さんに直接教えて上げられればよいのだが、私は素人なので、プロに対してそこまでする義理はないだろう。
で、LED1個では寂しいから、同じコードを繰り返して、8個でLチカ。
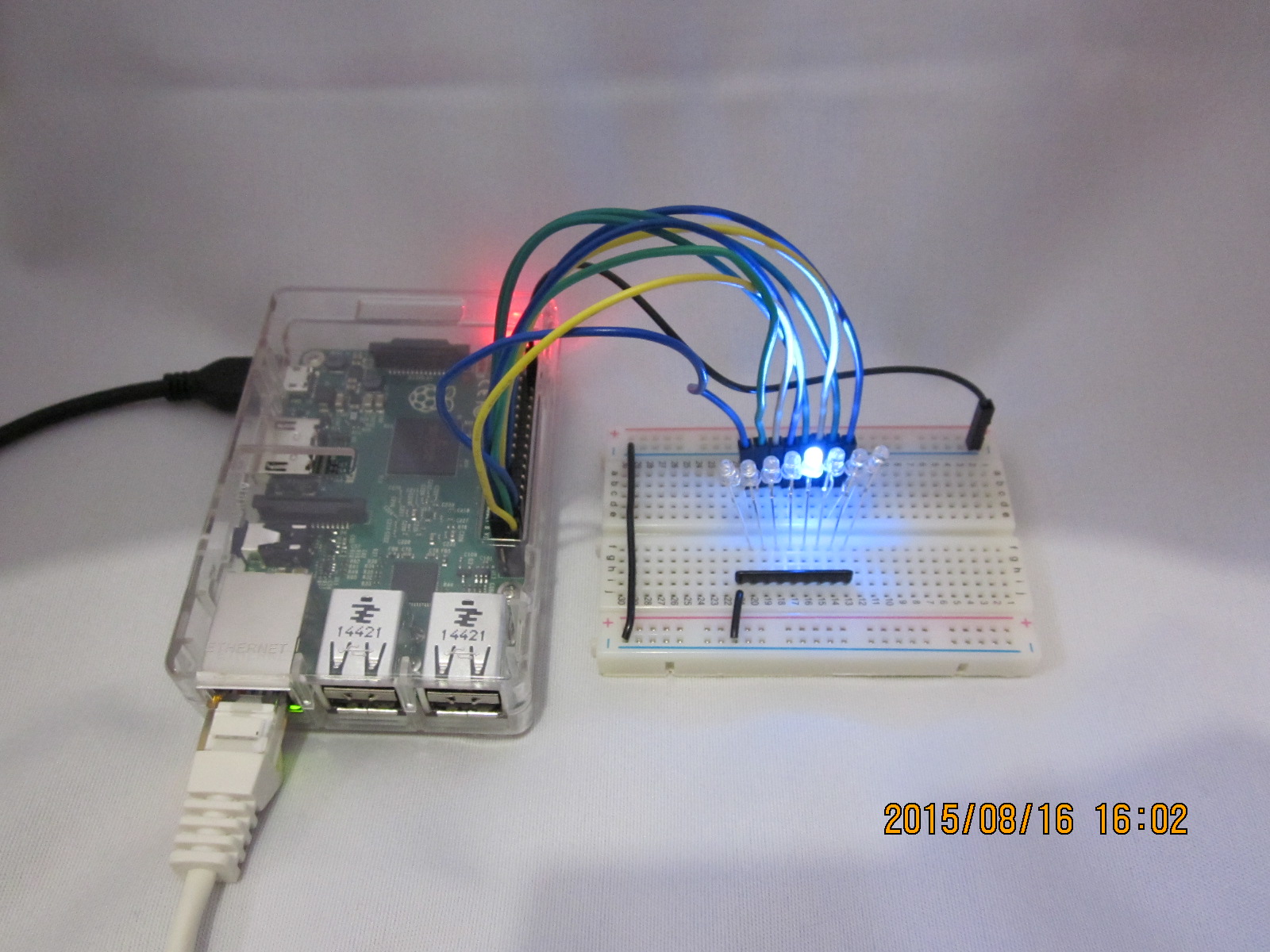
抵抗は8素子9ピンの集合抵抗、各素子330Ω。Vfが3.0~3.4V、Ifが20mAとある青色LEDなのだが、抵抗がこれだけならせいぜい10mAくらいだ。GPIOの各ピンから流せる電流は50mAまでだそうなので、まあ、大丈夫だろう。
動かすとこんな感じ。
プログラムは、GPIOのセットアップをするシェルと、Perlのスクリプトだ。
シェルはこのようなもの。コピペで繰り返しただけ。シェル内の数字がピン番号。
#!/bin/sh echo 5 >/sys/class/gpio/export echo 6 >/sys/class/gpio/export echo 13 >/sys/class/gpio/export echo 19 >/sys/class/gpio/export echo 26 >/sys/class/gpio/export echo 21 >/sys/class/gpio/export echo 20 >/sys/class/gpio/export echo 16 >/sys/class/gpio/export echo out >/sys/class/gpio/gpio5/direction echo out >/sys/class/gpio/gpio6/direction echo out >/sys/class/gpio/gpio13/direction echo out >/sys/class/gpio/gpio19/direction echo out >/sys/class/gpio/gpio26/direction echo out >/sys/class/gpio/gpio21/direction echo out >/sys/class/gpio/gpio20/direction echo out >/sys/class/gpio/gpio16/direction
Perlも同じで、コピペで繰り返しただけ。……「配列に書けよ」とかの至極もっともなツッコミはナシの方向でお願いいたしますです(笑)。
#!/usr/bin/perl
# perl2LEDx8
# perlで8個Lチカ
# 27.8.16(日)1500~
# 佐藤俊夫
#
use strict;
use warnings;
use Time::HiRes 'sleep';
open(LED1, ">/sys/class/gpio/gpio5/value");
open(LED2, ">/sys/class/gpio/gpio6/value");
open(LED3, ">/sys/class/gpio/gpio13/value");
open(LED4, ">/sys/class/gpio/gpio19/value");
open(LED5, ">/sys/class/gpio/gpio26/value");
open(LED6, ">/sys/class/gpio/gpio21/value");
open(LED7, ">/sys/class/gpio/gpio20/value");
open(LED8, ">/sys/class/gpio/gpio16/value");
LED1->autoflush(1);
LED2->autoflush(1);
LED3->autoflush(1);
LED4->autoflush(1);
LED5->autoflush(1);
LED6->autoflush(1);
LED7->autoflush(1);
LED8->autoflush(1);
while(){
print LED8 0;
print LED1 1;
sleep(0.2);
print LED1 0;
print LED2 1;
sleep(0.2);
print LED2 0;
print LED3 1;
sleep(0.2);
print LED3 0;
print LED4 1;
sleep(0.2);
print LED4 0;
print LED5 1;
sleep(0.2);
print LED5 0;
print LED6 1;
sleep(0.2);
print LED6 0;
print LED7 1;
sleep(0.2);
print LED7 0;
print LED8 1;
sleep(0.2);
}
いやもう、「オッサンとバイエル、ピアノ等」って銘打ってて、長らくなかったこのネタ。ええ、ピアノですよ、ピアノ。
……すなわちコレである。Arduinoをピアノにつなぎ、LEDをピアノ演奏に合わせて明滅させようというものだ。
いまや遅しとやってみた。
一つ覚えみたいにノクターンで申し訳ないですが(笑)、すんませんレパートリーがあんまりないもんで。

アナログピンからピアノの音声出力を読み、それに合わせてTLC5940NTに接続されたLEDを適宜明滅させるわけである。いかにもピアノ風味に明滅させるにあたっては、乱数によるLED選択と、先日会得した「PWMを十分に使い、余韻をもって各LEDを徐々に消す」という技を遺憾なく使用した。
これをやるには、アナログピンに上手に音声を入れる必要がある。
こういう時、電圧レベルを知るのにオシロスコープなどが使えればいいのだが、残念ながら持っていない。そこで、あらかじめテスターのACでテレビ、ラジオ、自分のピアノなどの音声出力端子からだいたいのレベルを推定し、次に十分な抵抗を入れて、Arduinoのアナログピンに入力して読み取った。その結果、だいたい200mVの振幅程度であることがわかった。これならばArduinoに直接入れてもどうということはなさそうだ。ただし、レベルが小さいから、ソフトウェアのほうでうまくやる必要がある。
次に、音声はアナログ信号だから、プラス・マイナスに振れる。一方、Arduinoのアナログ入力は0~5Vの間を1024分割で読むのだから、ここをうまく工夫しなければならない。
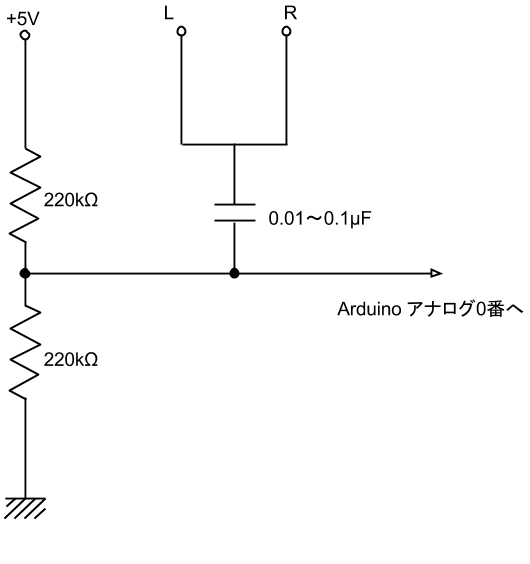
まず、2.5Vを中心に電圧が振れるよう、2.5Vを生成して合成する。ちょうどTLC5940NTを動かすために5Vの3端子レギュレータを使っているので、ここから抵抗分圧で2.5Vを作り、それを合成する。合成するとき、出力側の音声端子に電流が流れ込んではまずいから、コンデンサを0.1μFばかりつける。周波数は見当がつくが、電圧の見当がつきにくいので、とりあえず0.1μFにして、出来が悪いようなら取り換えることにする。
まず、大して疑問もない簡素な付加回路。たしか、パルス技術ではこういうの、「クランパ」って言ったっけな……。
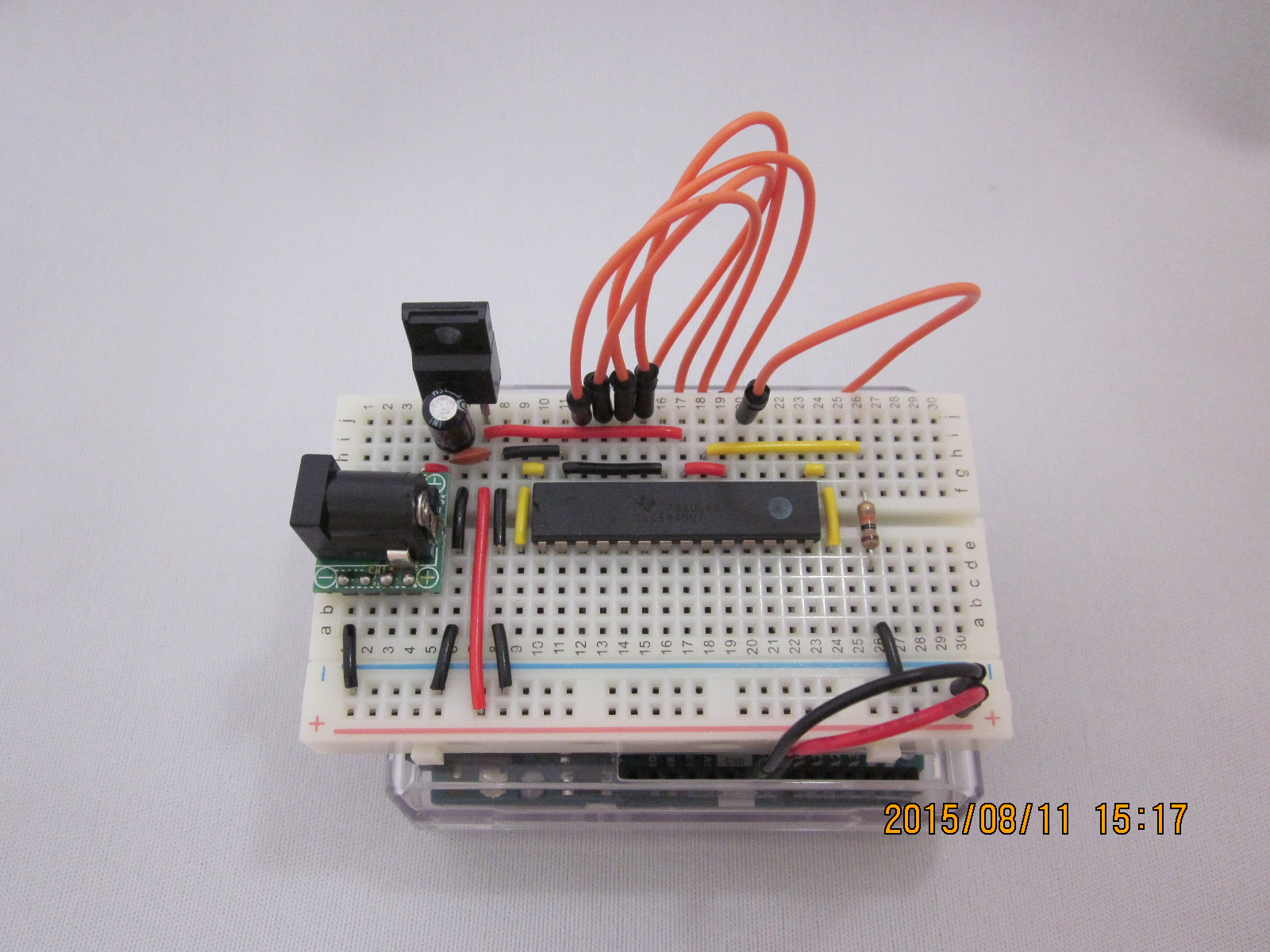
それで、TLCなどと一緒にLEDを植え込む。
ミニジャックを接続するために、秋月電子の「ステレオミニジャックDIP化キット」を取り付けた。
で、スケッチはこうなった。
// // voice2tlc.ino // アナログピンに音声を入れ、TLC5940NTを使ってLEDを光らせる。 // 27.08.13(木)1000~ // 佐藤俊夫 // #include "Tlc5940.h" #include <stdio.h> // const int AUDIO = 0, // アナログ0ピン THRESH = 8; // 8単位以上のレベルならLEDを点灯 // void setup() { Tlc.init(); Tlc.clear(); Tlc.update(); } void loop() { int v = 0, l = 0; static long int prevtime = 0.0; static int prevv = 0; v = abs(analogRead(AUDIO) - 512); l = constrain(fmap(v, 0, 15, 0, 4095), 0, 4095); if(millis() >= prevtime + 10){ prevtime = millis(); for(int i = 0; i <= 15; i++){ Tlc.set(i, Tlc.get(i) * 0.9); } } for(int i = 0; i <= 15; i++){ if(random(0, 16) == 1 && prevv != v && v >= THRESH){ Tlc.set(i, l); } } Tlc.update(); prevv = v; } // float fmap(float x, float in_min, float in_max, float out_min, float out_max) { // もともとの「map()」がlong int型でこの用途に合わないので、float型を定義 return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min; }
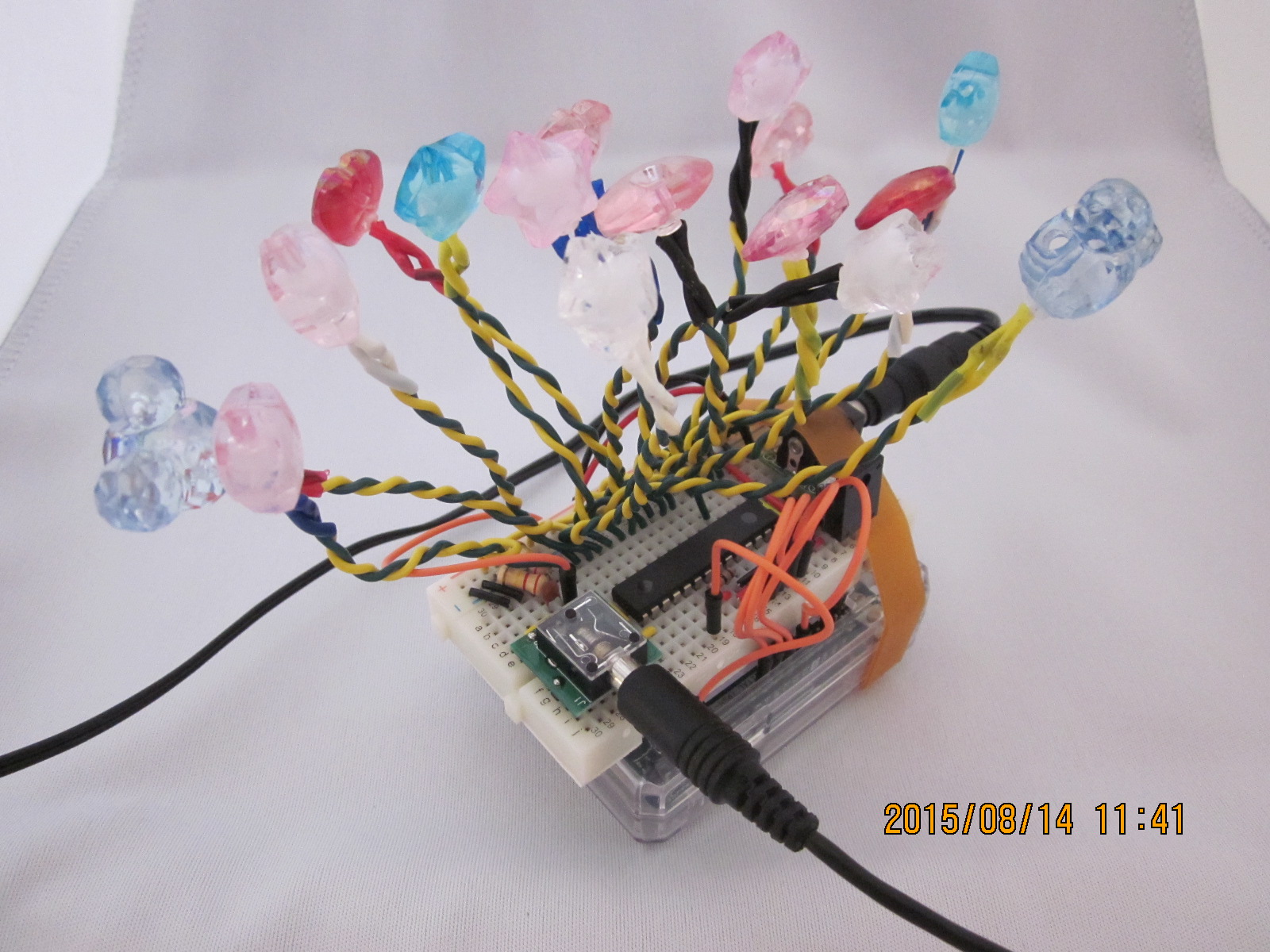
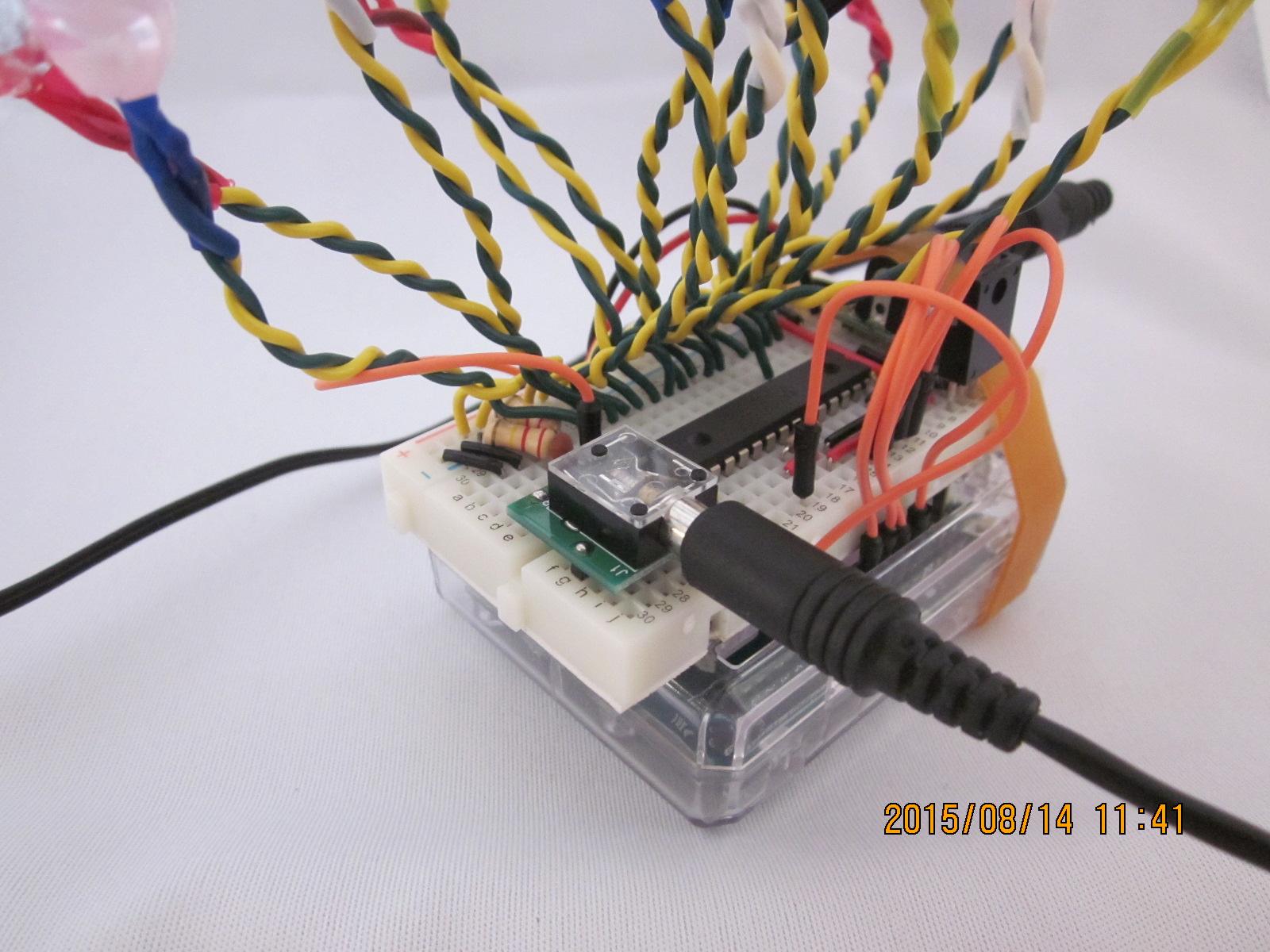
実用的なモノというとネット便器ぐらいしか作らず、Lチカばかりやっている今日この頃であるが、Lチカは楽しいので仕方がない。というか、「ネット便器のどこが実用的なのか?」というツッコミに極めて脆弱な文章をついつい書いてしまっているところもなかなか痛いが、さておき、昼間の「亀の子ブレボー」に、いつぞや大量生産したビーズ付きLEDを目一杯大量に植え込み、TLC5940NTでゴンゴンドライブしてみた。
前回TLC5940NTを使ったときは、単純に右から左へ光るだけだったが、今度と言う今度は、もう、今思いつくだけあらん限りいろんな光らせ方をさせてみた。
亀の子ブレッドボードは、なかなか省スペースで、うまく組み付けられる。
LEDをタップリ植え込むとこうなる。

動かすとこんな感じだ。
スケッチはこうなった。はじめはタクトスイッチで手動切り替えをしていたが、面倒臭くなり、乱数で切り替えるようにした。
// // tlcVariation.ino // TLC5940NTにつないだLED、ランダムにいろんな光らせ方をしてみる。 // 27.08.11(火) 1515~ // 佐藤俊夫 // #include "Tlc5940.h" // const int switchInterval = 5000; // void setup() { Tlc.init(); Tlc.clear(); Tlc.update(); } // void loop() { static int mode = 0; static long int prevtime = 0; if(millis() > prevtime + switchInterval){ mode = random(0, 8); prevtime = millis(); // 今のエフェクトを徐々に消す。 int maxlum = 0; do{ maxlum = 0; for(int i = 0; i <= 15; i++){ Tlc.set(i, Tlc.get(i) * 0.9); maxlum = Tlc.get(i) > maxlum ? Tlc.get(i) : maxlum; } Tlc.update(); delay(20); }while(maxlum > 0); } switch(mode){ case 0: sinCurve_diff(); break; case 1: inOrder_left(); break; case 2: toCenter(); break; case 3: inOrder_tail(); break; case 4: left_right(); break; case 5: left_right_tail(); break; case 6: allAtOnce_tail(); break; case 7: inOrder_right(); break; default: sinCurve_diff(); break; } } // void inOrder_right(){ // 0.1秒おきに右から切り替えていく。 static long int prevtime = 0.0; static int led = 15; Tlc.clear(); if(millis() >= prevtime + 100){ Tlc.clear(); Tlc.set(led--, 4095); led = led < 0 ? 15 : led; Tlc.update(); prevtime = millis(); } } // void allAtOnce_tail(){ // 一斉に点灯して徐々に消える。 static long int prevtime = 0; if(millis() > prevtime + 100){ prevtime = millis(); if(Tlc.get(0) <= 0){ for(int i = 0; i <= 15; i++){ Tlc.set(i, 4095); } }else{ for(int i = 0; i <= 15; i++){ Tlc.set(i, Tlc.get(i) * 0.8); } } Tlc.update(); } } // void left_right_tail(){ // 尾を引きながら右へ行ったり左へ行ったり。 static long int prevtime = 0.0; static int led = 0, order = 1; if(millis() >= prevtime + 100){ for(int i = 0; i <= 15; i++){ Tlc.set(i, (int)((float)Tlc.get(i) * 0.5)); } led = led + order; Tlc.set(led, 4095); order = (led >= 15) || (led <= 0) ? order * -1 : order; Tlc.update(); prevtime = millis(); } } // void left_right(){ // 右へ行ったり左へ行ったり static long int prevtime = 0.0; static int led = 0, order = 1; if(millis() >= prevtime + 100){ Tlc.clear(); led = led + order; Tlc.set(led, 4095); order = (led >= 15) || (led <= 0) ? order * -1 : order; Tlc.update(); prevtime = millis(); } } // void inOrder_tail(){ // 尾を引きながら0.1秒おきに左から切り替えていく。 static long int prevtime = 0.0; static int led = 0; if(millis() >= prevtime + 100){ for(int i = 0; i <= 15; i++){ Tlc.set(i, (int)((float)Tlc.get(i) * 0.5)); } Tlc.set(led++, 4095); led = led > 15 ? 0 : led; Tlc.update(); prevtime = millis(); } } // void toCenter(){ // 中央付近のLEDから外へ光らせる。 static long int prevtime = 0.0; static int ledleft = 7, ledright = 8; if(millis() >= prevtime + 100){ for(int i = 0; i <= 15; i++){ Tlc.set(i, (int)((float)Tlc.get(i) * 0.5)); } Tlc.set(ledright++, 4095); Tlc.set(ledleft--, 4095); ledright = ledright > 15 ? 8 : ledright; ledleft = ledleft < 0 ? 7 : ledleft; Tlc.update(); prevtime = millis(); } } // void inOrder_left(){ // 0.1秒おきに切り替えていく。 static long int prevtime = 0.0; static int led = 0; Tlc.clear(); if(millis() >= prevtime + 100){ Tlc.clear(); Tlc.set(led++, 4095); led = led > 15 ? 0 : led; Tlc.update(); prevtime = millis(); } } // void sinCurve_diff(){ // 呼ぶたびにサインカーブをちょっとづつずらしながら光らせる。 static float x[16] = { 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0 }; for(int i = 0; i <= 15; i++){ x[i] = x[i] >= (2.0 * PI) ? 0.0 : x[i] + ((2.0 * PI) / 1000.0) * (1.0 + (float)i / 10.0); Tlc.set(i, (int)(((sin(x[i]) + 1.0) / 2.0) * 4095)); } Tlc.update(); }