LEDは半導体であるから、電球と違って、光り始める前は抵抗は無限大であり、電流は流れない。ところが電圧がVfを超えて光り始めたら最後、抵抗がなくなって電源をショートさせた状態でぶっ飛び、自分自身も壊れる。従って必ず抵抗を一緒にくっつけてやるのだ。
その抵抗を選ぶのは簡単で、基本的に

ここに、
V 自分が用意する電源の電圧
Vf 買ってきたLEDのVf(順方向電圧)、つまり光り始める電圧
If 買ってきたLEDのIf(順方向電流)、つまり光らせるために必要な電流
ただ、抵抗は入手可能な数値が決まっており、そのものピタリという抵抗値のものは売っていない。なので、計算した値と一番近い抵抗を選び、その抵抗値で再び電流を計算して、買ってきたLEDのIfを超えていないかどうかを確かめる。
これが、簡単な計算ではあるけどいちいち面倒くさい。
それでまあ、抵抗を選ぶのにこういうスプレッドシートを作る。
それから、これを使ってみよう。

これは、「武蔵野電波のプロトタイパーズ第15回『TLC5940で16個のLEDを遊ぶ』」で取り上げられている「TLC5940NT」というICだ。千石電商本店2階、入って左側の、一番奥のほうの抽斗で売られている。武蔵野電波のページでは400~700円とされているが、千石電商の店頭売りでは390円である。
Arduinoで使うには、GitHubにあるライブラリをダウンロードし、zipを展開して出てくる「tlc5940」というディレクトリをArduino IDEのインストールディレクトリの下にある「libraries」の中にコピーすればよい。
スペックシートはコレだが、スペックシートを見るより、Arduinoにライブラリを入れると出てくるようになるサンプルスケッチの「BasicUse」を見た方が分かり易いと思う。こんな風にサンプルは書かれている。
/* Basic Pin setup: ------------ ---u---- ARDUINO 13|-> SCLK (pin 25) OUT1 |1 28| OUT channel 0 12| OUT2 |2 27|-> GND (VPRG) 11|-> SIN (pin 26) OUT3 |3 26|-> SIN (pin 11) 10|-> BLANK (pin 23) OUT4 |4 25|-> SCLK (pin 13) 9|-> XLAT (pin 24) . |5 24|-> XLAT (pin 9) 8| . |6 23|-> BLANK (pin 10) 7| . |7 22|-> GND 6| . |8 21|-> VCC (+5V) 5| . |9 20|-> 2K Resistor -> GND 4| . |10 19|-> +5V (DCPRG) 3|-> GSCLK (pin 18) . |11 18|-> GSCLK (pin 3) 2| . |12 17|-> SOUT 1| . |13 16|-> XERR 0| OUT14|14 15| OUT channel 15 ------------ -------- - Put the longer leg (anode) of the LEDs in the +5V and the shorter leg (cathode) in OUT(0-15). - +5V from Arduino -> TLC pin 21 and 19 (VCC and DCPRG) - GND from Arduino -> TLC pin 22 and 27 (GND and VPRG) - digital 3 -> TLC pin 18 (GSCLK) - digital 9 -> TLC pin 24 (XLAT) - digital 10 -> TLC pin 23 (BLANK) - digital 11 -> TLC pin 26 (SIN) - digital 13 -> TLC pin 25 (SCLK) - The 2K resistor between TLC pin 20 and GND will let ~20mA through each LED. To be precise, it's I = 39.06 / R (in ohms). This doesn't depend on the LED driving voltage. - (Optional): put a pull-up resistor (~10k) between +5V and BLANK so that all the LEDs will turn off when the Arduino is reset. If you are daisy-chaining more than one TLC, connect the SOUT of the first TLC to the SIN of the next. All the other pins should just be connected together: BLANK on Arduino -> BLANK of TLC1 -> BLANK of TLC2 -> ... XLAT on Arduino -> XLAT of TLC1 -> XLAT of TLC2 -> ... The one exception is that each TLC needs it's own resistor between pin 20 and GND. This library uses the PWM output ability of digital pins 3, 9, 10, and 11. Do not use analogWrite(...) on these pins. This sketch does the Knight Rider strobe across a line of LEDs. Alex Leone <acleone ~AT~ gmail.com>, 2009-02-03 */ #include "Tlc5940.h" void setup() { /* Call Tlc.init() to setup the tlc. You can optionally pass an initial PWM value (0 - 4095) for all channels.*/ Tlc.init(); } /* This loop will create a Knight Rider-like effect if you have LEDs plugged into all the TLC outputs. NUM_TLCS is defined in "tlc_config.h" in the library folder. After editing tlc_config.h for your setup, delete the Tlc5940.o file to save the changes. */ void loop() { int direction = 1; for (int channel = 0; channel < NUM_TLCS * 16; channel += direction) { /* Tlc.clear() sets all the grayscale values to zero, but does not send them to the TLCs. To actually send the data, call Tlc.update() */ Tlc.clear(); /* Tlc.set(channel (0-15), value (0-4095)) sets the grayscale value for one channel (15 is OUT15 on the first TLC, if multiple TLCs are daisy- chained, then channel = 16 would be OUT0 of the second TLC, etc.). value goes from off (0) to always on (4095). Like Tlc.clear(), this function only sets up the data, Tlc.update() will send the data. */ if (channel == 0) { direction = 1; } else { Tlc.set(channel - 1, 1000); } Tlc.set(channel, 4095); if (channel != NUM_TLCS * 16 - 1) { Tlc.set(channel + 1, 1000); } else { direction = -1; } /* Tlc.update() sends the data to the TLCs. This is when the LEDs will actually change. */ Tlc.update(); delay(75); } }
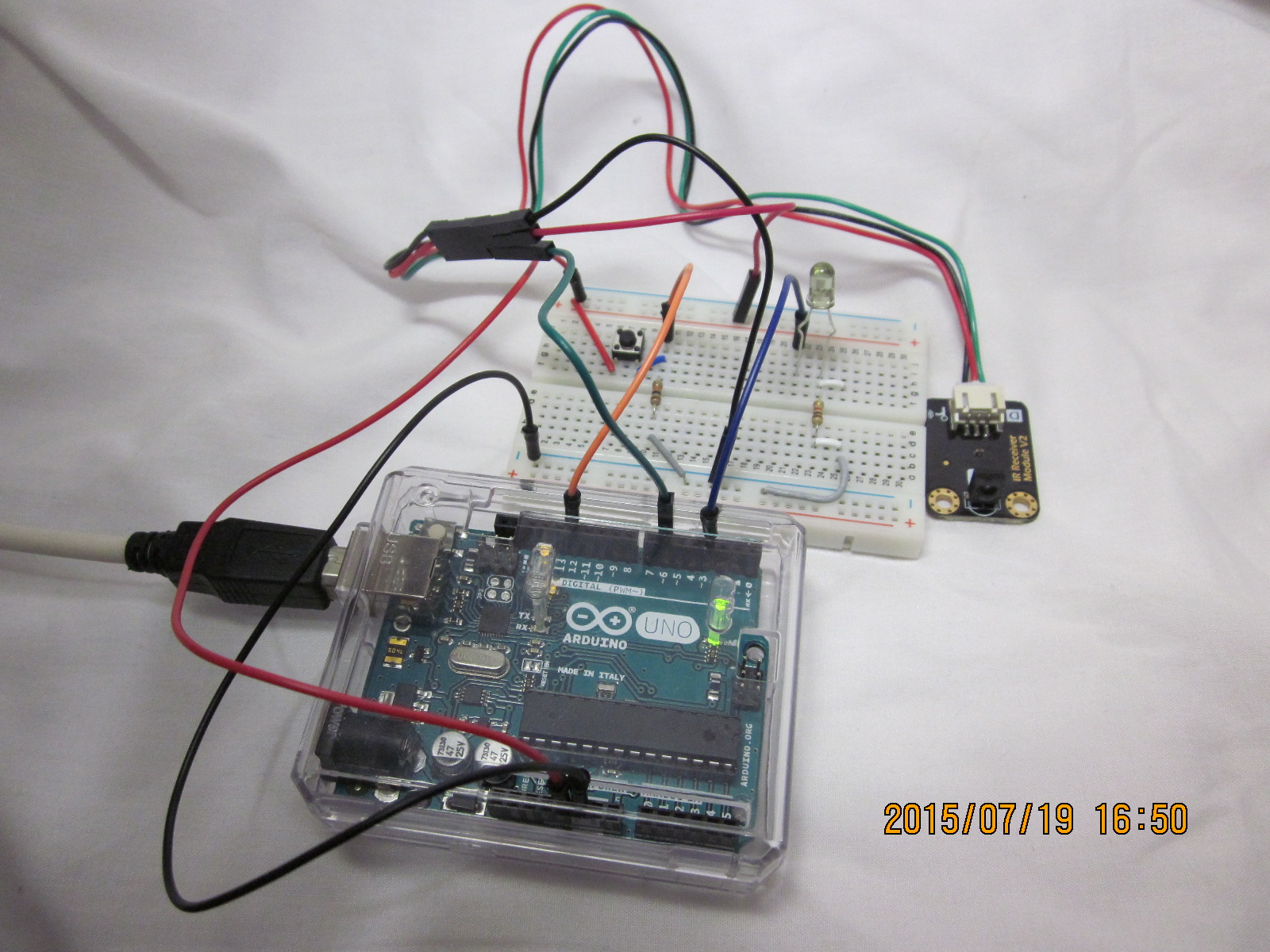
この最初のほうのコメントにアスキー・アートで書かれている図を見て結線するとよい。こんな感じだ。

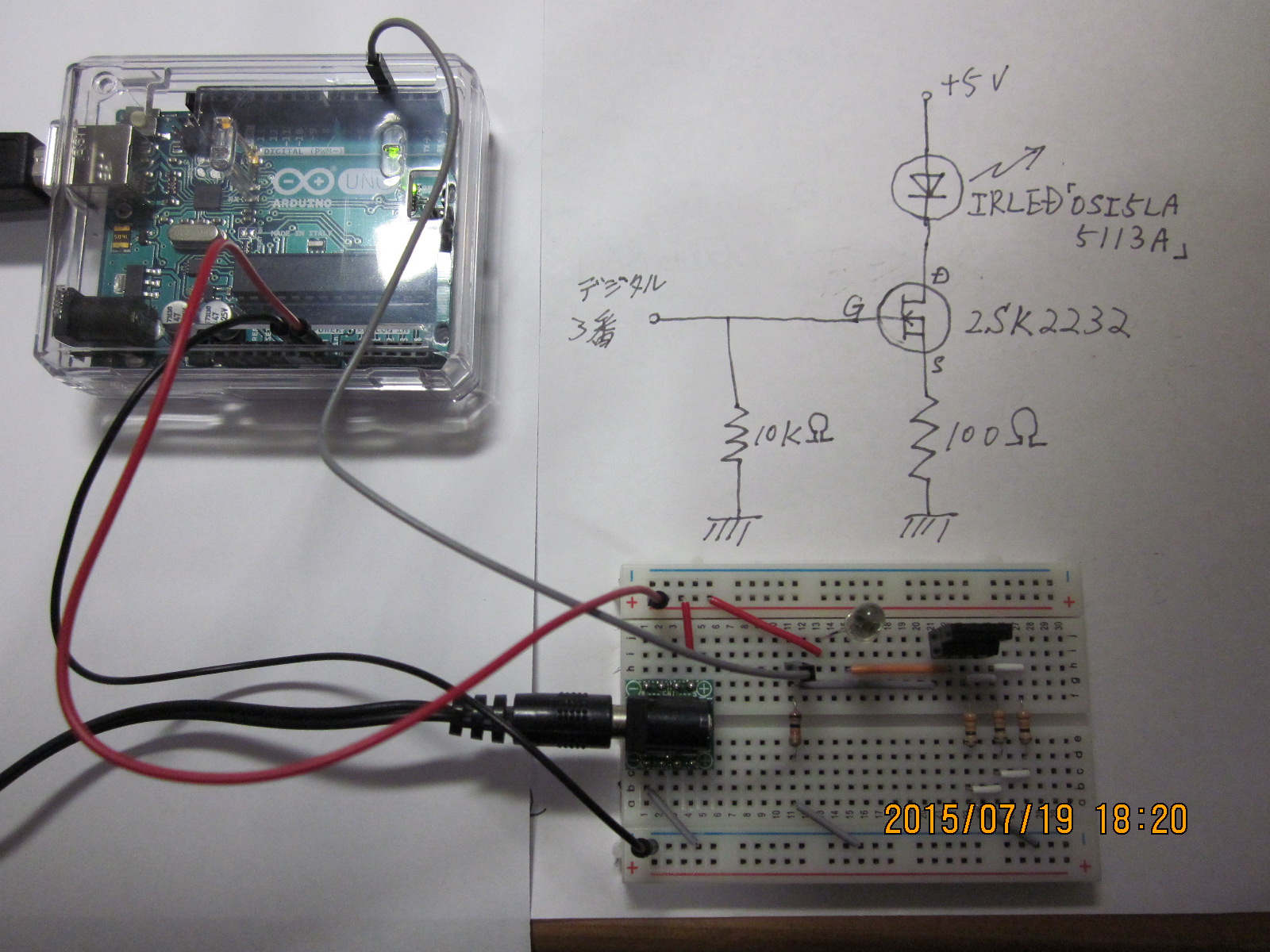
LEDは秋葉原・千石電商の隣の店、「akiba LEDピカリ館」で売っていた10個入り300円の白色LEDで、Vfが3.0V~3.4V、Ifが20mAとある。電源が5Vならば100Ωばかり抵抗を付けてやればいい理屈だが、全部点灯させるとArduinoがダメになってしまうから、さらに絞って10KΩつけてやる。
コンパイルして動かすとこうなる。
10kΩでもこれくらい明るい。
このICを使うと、パルス幅変調の幅も、Arduinoが256段階であるのに比べ、4096段階と格段に細かくなる。
アレンジを加えてみよう。昨日買ってきたポテンショメータを使う。アナログの4番ピンと5番ピンに50kΩのポテンショメータと10kΩの抵抗をつなぎ、それぞれを強さと速さにして、「尾を引いたみたいに」明るさ制御をする。
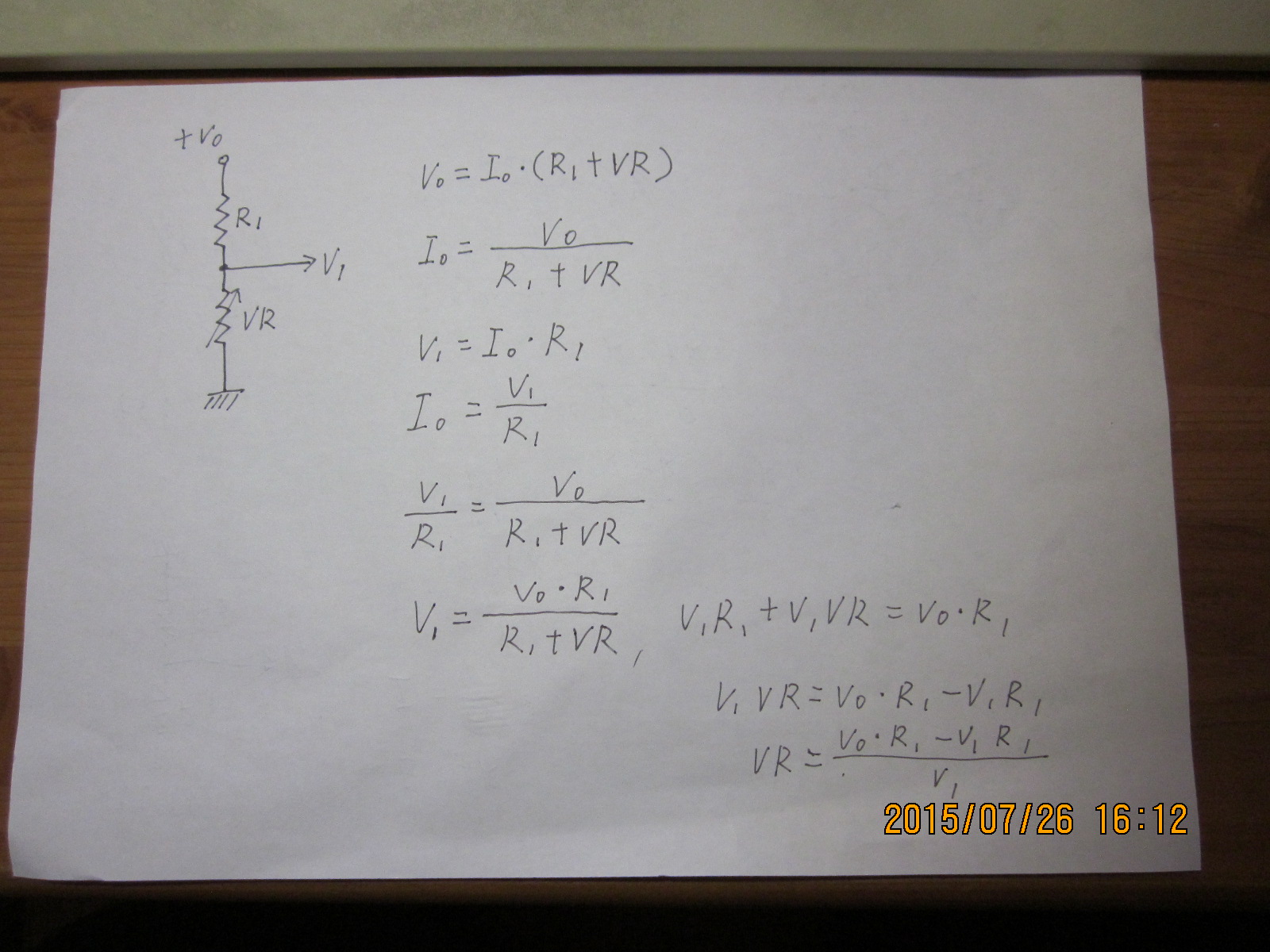
ポテンショメータの回路はこうする。

図の「E1」をアナログ入力で読めばよい。ポテンショメータのつまみの位置は、次の計算でR2を求めれば明らかになる。


① = ②





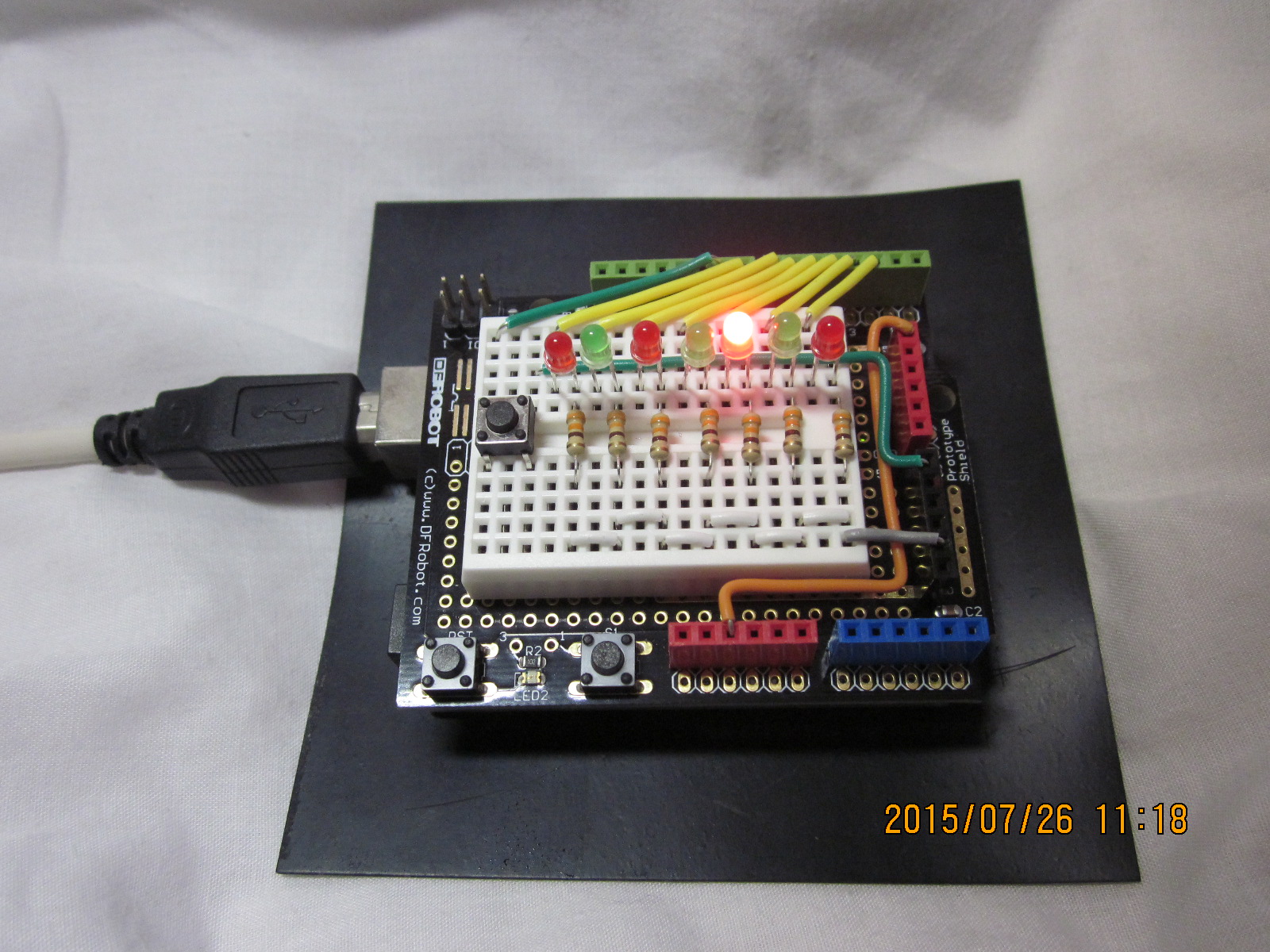
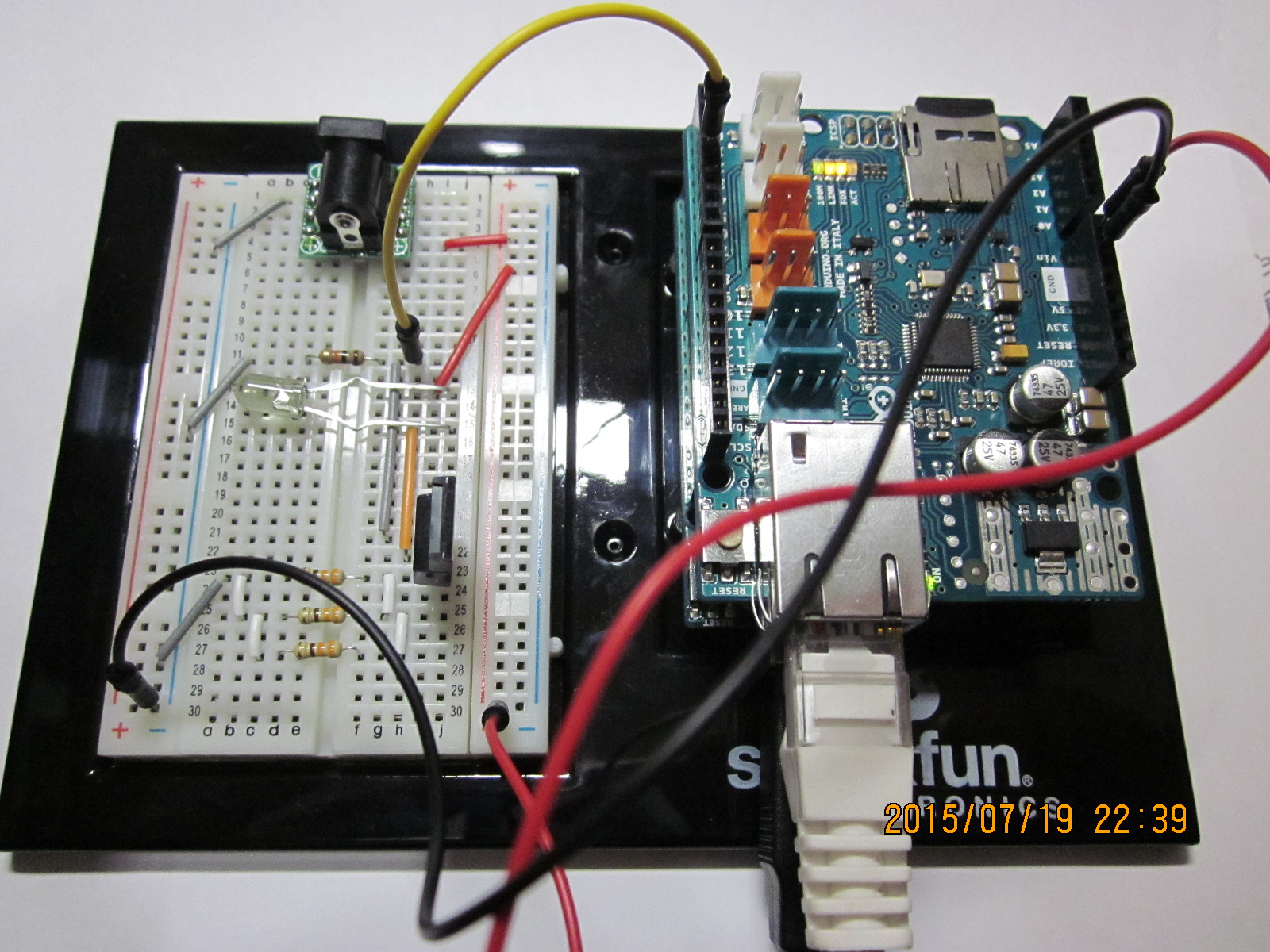
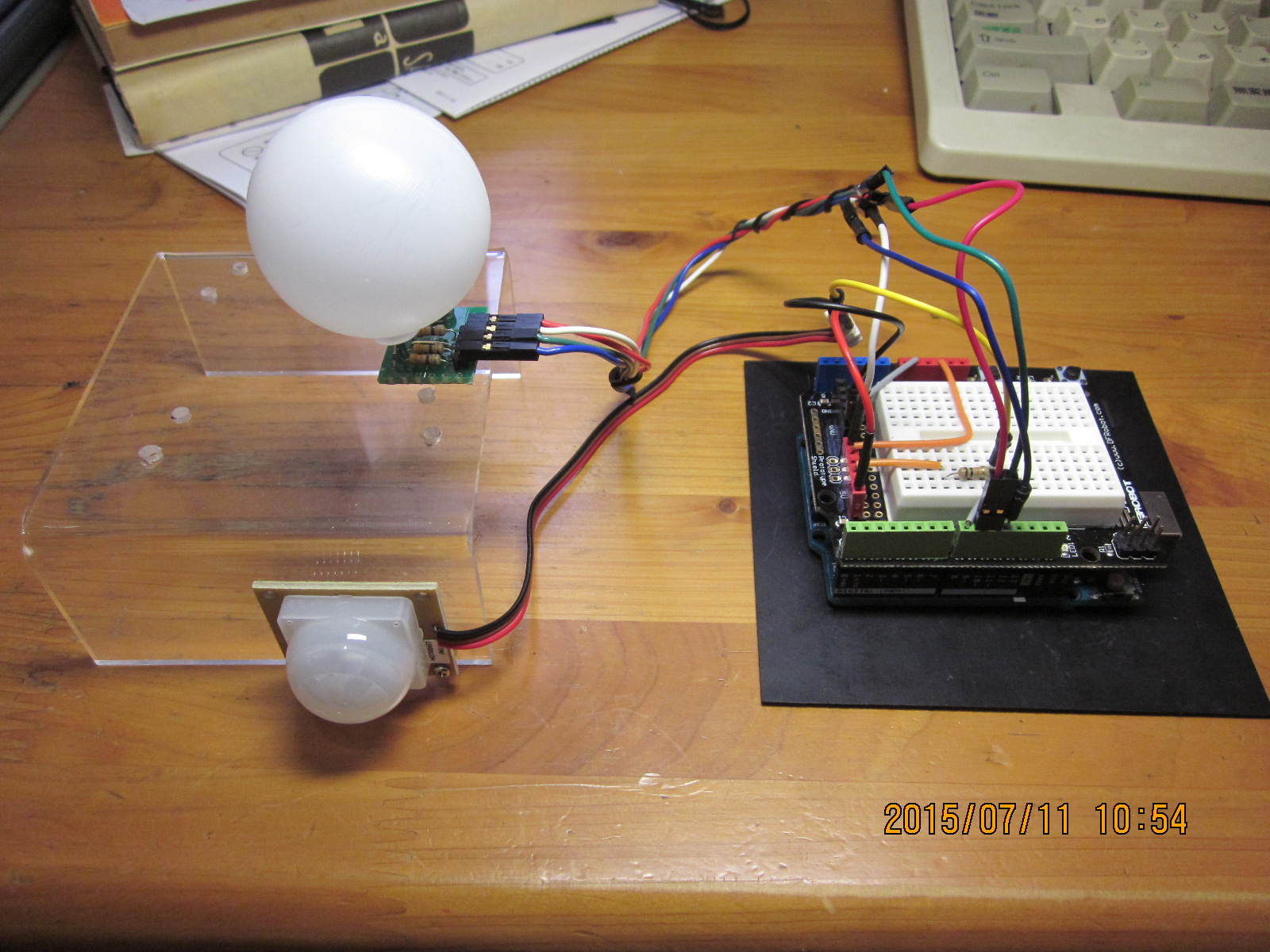
組み付けるとこうなる。
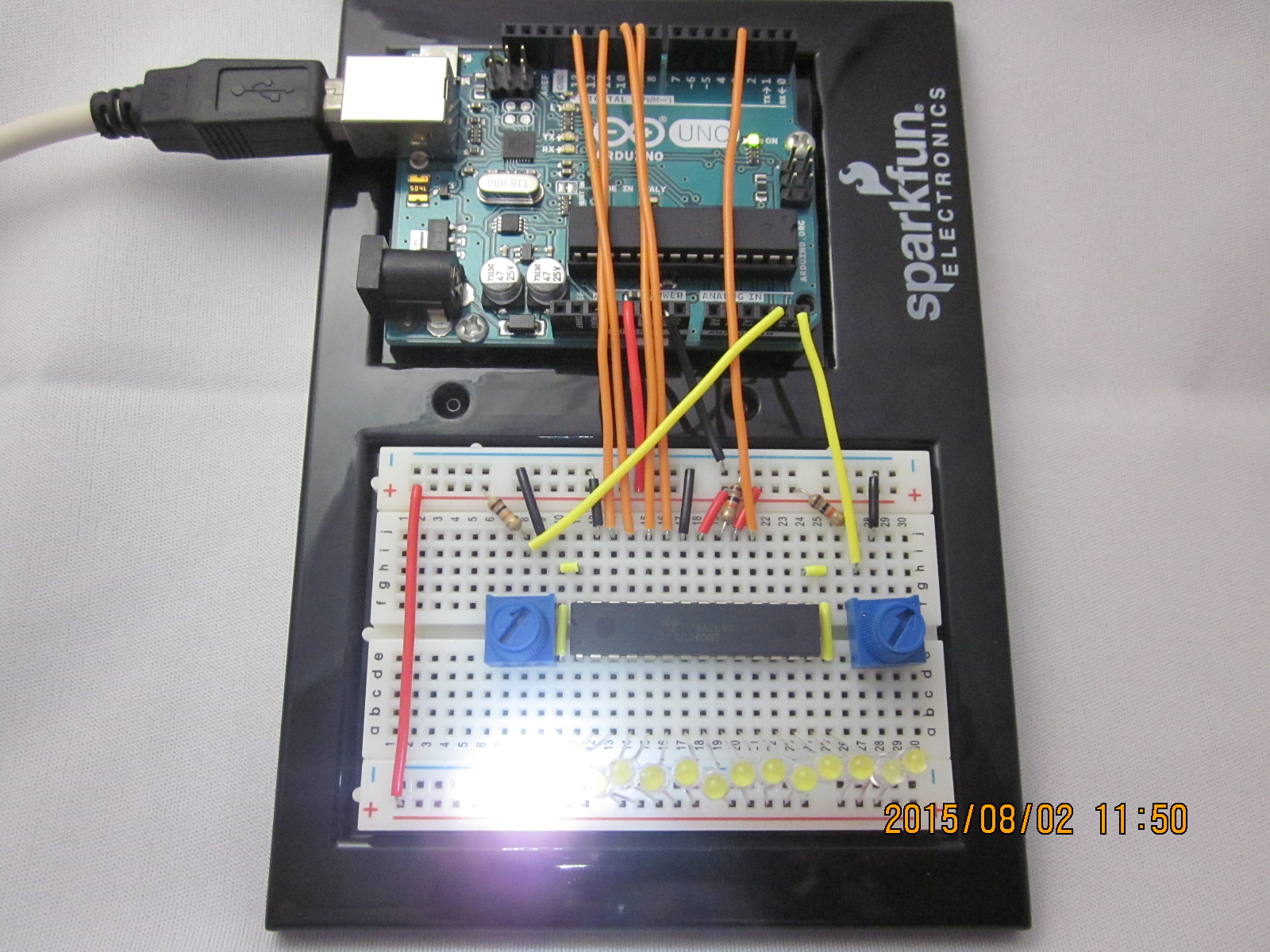
動かすとこんな感じ。
スケッチはこんな感じ。
// // wPotentio2tlc5940.ino // ポテンショメータとTLC5940でLチカ // 27.08.02(日)0900~ // 佐藤俊夫 // #include "Tlc5940.h" // const float R1 = 10000.0, // ポテンショメータ前の抵抗10kΩ, E0 = 5.0, // 電源電圧5V, MAXVR = 50000.0; // ポテンショメータの最大抵抗 const unsigned int VR1 = 4, VR2 = 5; // ポテンショメータはアナログピンのA4・A5 const unsigned int MAX_LED = 15; // LEDは0~15の16個 // void setup() { Tlc.init(); pinMode(VR1, INPUT); pinMode(VR2, INPUT); } void loop() { float vr1 = 0.0, vr2 = 0.0, e11 = 0.0, e21 = 0.0; static unsigned int topLed = 0, tailLen = 10; e11 = analogRead(VR1) * (5.0 / 1024); e21 = analogRead(VR2) * (5.0 / 1024); vr1 = (e11 * R1) / (E0 - e11); // 明るさ vr2 = (e21 * R1) / (E0 - e21); // 速さ if(++topLed > MAX_LED + tailLen) topLed = 0; Tlc.clear(); int bright = constrain(fmap(vr1, 0.0, MAXVR, 0, 4095), 0, 4095); Tlc.set(topLed, bright); for(int i = topLed - 1; i >= 0; i--){ bright -= (4096 / tailLen); if(bright < 0) bright = 0; Tlc.set(i, bright); } Tlc.update(); unsigned int delayTime = constrain(fmap(vr2, 0.0, MAXVR, 100, 10), 10, 100); delay(delayTime); } // float fmap(float x, float in_min, float in_max, float out_min, float out_max) { // もともとの「map()」がlong int型でこの用途に合わないので、float型を定義 return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min; }