Raspberry Piはコンピュータ・パワーが大きいから、大きなウェブ・コンテンツも本体内に飲み込んでしまえる。
そこで、である。Raspberry Piで遊ぶのに、なにも世間の教科書通りにPythonやRubyの作例を打ち込むだけが能ではない。CだってC++だって、PerlだってPHPだって動くはずである。SMTPもPOPもNTPも、なんだって動く。多分MySQLだのPostgreSQLだのも動くだろう。
Apacheをインストールして動かしてみよう。それから、PHPでGPIOを突っついてみよう。これは、PHPでハードウェアを動かすことにつながる。無駄に贅沢なWebインターフェイスでLチカ、というのも面白い。
Apacheのインストールに先立ち、今動いているサービスを確かめよう
まず、今起動しているモノを確認してみよう。RedHat系のLinux、Fedoraなどはこういう時に「chkconfig –list」などとするが、Raspberry Piに入っているのは「Raspbian」だ。RaspbianはDebian系のディストリビューションなので、chkconfigはない。
私はUNIX育ちのオッサンで、SVR4.2の管理人を長年やっきた。Linuxに関してはフリー時代のRedHat(4~9ぐらいまで)、それ以降はずっとFedora Coreを使ってきたので、Debianは良く知らないのである。ま、これも機会だから、ちょっと体験してみようではないの。
ネット情報 によると「insserv」「update-rc.d」「sysv-rc-conf」「rcconf」「upstart」などがあるという。
# insserv -s
K:01:0 1 6:triggerhappy
K:07:0 6:umountfs
K:04:0 6:umountnfs.sh
K:02:0 6:sendsigs
K:01:0 6:plymouth
K:03:0 1 6:rsyslog
K:06:0 6 S:hwclock.sh
K:01:0 1 6:alsa-utils
K:06:0 6:networking
K:05:0 1 2 3 4 5 6 S:rpcbind
K:05:0 1 2 3 4 5 6 S:nfs-common
K:01:0 6:urandom
K:01:0 1 6:avahi-daemon
K:01:0 1 6:dhcpcd
K:01:0 1 6:cgroup-bin
K:08:0 6:umountroot
K:09:0:halt
K:09:6:reboot
K:01:0 1 6:fake-hwclock
K:01:0 1 2 6:lightdm
K:01:0 1 6:ifplugd
S:02:S:udev
S:03:S:keyboard-setup
S:15:S:console-setup
S:01:2 3 4 5:triggerhappy
S:08:S:mountall.sh
S:09:S:mountall-bootclean.sh
S:12:S:mountnfs.sh
S:13:S:mountnfs-bootclean.sh
S:04:2 3 4 5:plymouth
S:01:2 3 4 5:rsyslog
S:16:S:alsa-utils
S:11:S:networking
S:10:S:urandom
S:04:S:mountdevsubfs.sh
S:05:S:checkroot.sh
S:03:2 3 4 5:avahi-daemon
S:02:2 3 4 5:dbus
S:01:2 3 4 5:dhcpcd
S:01:2 3 4 5:cgroup-bin
S:01:S:mountkernfs.sh
S:01:S:fake-hwclock
S:03:3 4 5:lightdm
S:16:S:x11-common
S:14:S:kbd
S:01:2 3 4 5:ifplugd
S:02:1:single
S:01:1:killprocs
S:01:1 2 3 4 5:bootlogs
S:01:S:hostname.sh
S:01:1 2 3 4 5:motd
S:02:2 3 4 5:dphys-swapfile
S:04:2 3 4 5:rc.local
S:04:2 3 4 5:rmnologin
S:02:2 3 4 5:cron
S:02:2 3 4 5:rsync
S:02:2 3 4 5:ssh
S:02:2 3 4 5:ntp
S:01:2 3 4 5:sudo
S:16:S:raspi-config
S:10:S:udev-mtab
S:06:S:checkroot-bootclean.sh
S:16:S:bootmisc.sh
S:06:S:kmod
S:16:S:plymouth-log
S:07:S:checkfs.sh
S:06:S:mtab.sh
S:10:S:procps
ほほー、なるほど、コレは多分、左から現状(StartかKillか)、起動順、起動すべきRun-Levelのリスト、サービス名、だろうなあ。はて、S、Kじゃないほうの、Run-Levelの「S」は、なんだろ、と調べると、「起動順で一番はじめ、かつ、どのRun-Levelでも共通で起動」ということのようである。
で、
# insserv -s | egrep '(pache)|(ttp)'
#
なんてことをやっても、全然何も出ないから、デフォルトのRaspbianではhttpらしきものやApacheらしきものは何も動いていない。
Apacheをインストール
それでは、というわけで、
# apt-get -s install apache2
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下の特別パッケージがインストールされます:
apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1
libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert
提案パッケージ:
apache2-doc apache2-suexec apache2-suexec-custom openssl-blacklist
以下のパッケージが新たにインストールされます:
apache2 apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1
libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert
アップグレード: 0 個、新規インストール: 10 個、削除: 0 個、保留: 0 個。
Inst libapr1 (1.4.6-3+deb7u1 Raspbian:7.0/oldstable [armhf])
Inst libaprutil1 (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Inst libaprutil1-dbd-sqlite3 (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Inst libaprutil1-ldap (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Inst apache2.2-bin (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst apache2-utils (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst apache2.2-common (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst apache2-mpm-worker (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst apache2 (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst ssl-cert (1.0.32 Raspbian:7.0/oldstable [all])
Conf libapr1 (1.4.6-3+deb7u1 Raspbian:7.0/oldstable [armhf])
Conf libaprutil1 (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Conf libaprutil1-dbd-sqlite3 (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Conf libaprutil1-ldap (1.4.1-3 Raspbian:7.0/oldstable [armhf])
Conf apache2.2-bin (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf apache2-utils (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf apache2.2-common (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf apache2-mpm-worker (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf apache2 (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf ssl-cert (1.0.32 Raspbian:7.0/oldstable [all])
#
特に問題なさそうだな、というわけで……
# apt-get install apache2
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下の特別パッケージがインストールされます:
apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1 libaprutil1
libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert
提案パッケージ:
apache2-doc apache2-suexec apache2-suexec-custom openssl-blacklist
以下のパッケージが新たにインストールされます:
apache2 apache2-mpm-worker apache2-utils apache2.2-bin apache2.2-common libapr1
libaprutil1 libaprutil1-dbd-sqlite3 libaprutil1-ldap ssl-cert
アップグレード: 0 個、新規インストール: 10 個、削除: 0 個、保留: 0 個。
1,356 kB のアーカイブを取得する必要があります。
この操作後に追加で 4,585 kB のディスク容量が消費されます。
続行しますか [Y/n]? y
取得:1 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libapr1 armhf 1.4.6-3+deb7u1 [90.9 kB]
取得:2 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1 armhf 1.4.1-3 [77.1 kB]
取得:3 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1-dbd-sqlite3 armhf 1.4.1-3 [17.2 kB]
取得:4 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libaprutil1-ldap armhf 1.4.1-3 [16.0 kB]
取得:5 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2.2-bin armhf 2.2.22-13+deb7u6 [676 kB]
取得:6 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-utils armhf 2.2.22-13+deb7u6 [163 kB]
取得:7 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2.2-common armhf 2.2.22-13+deb7u6 [292 kB]
取得:8 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-mpm-worker armhf 2.2.22-13+deb7u6 [2,238 B]
取得:9 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2 armhf 2.2.22-13+deb7u6 [1,440 B]
取得:10 http://mirrordirector.raspbian.org/raspbian/ wheezy/main ssl-cert all 1.0.32 [19.5 kB]
1,356 kB を 4秒 で取得しました (281 kB/s)
パッケージを事前設定しています ...
以前に未選択のパッケージ libapr1 を選択しています。
(データベースを読み込んでいます ... 現在 78616 個のファイルとディレクトリがインストールされています。)
(.../libapr1_1.4.6-3+deb7u1_armhf.deb から) libapr1 を展開しています...
以前に未選択のパッケージ libaprutil1 を選択しています。
(.../libaprutil1_1.4.1-3_armhf.deb から) libaprutil1 を展開しています...
以前に未選択のパッケージ libaprutil1-dbd-sqlite3 を選択しています。
(.../libaprutil1-dbd-sqlite3_1.4.1-3_armhf.deb から) libaprutil1-dbd-sqlite3 を展開しています...
以前に未選択のパッケージ libaprutil1-ldap を選択しています。
(.../libaprutil1-ldap_1.4.1-3_armhf.deb から) libaprutil1-ldap を展開しています...
以前に未選択のパッケージ apache2.2-bin を選択しています。
(.../apache2.2-bin_2.2.22-13+deb7u6_armhf.deb から) apache2.2-bin を展開しています...
以前に未選択のパッケージ apache2-utils を選択しています。
(.../apache2-utils_2.2.22-13+deb7u6_armhf.deb から) apache2-utils を展開しています...
以前に未選択のパッケージ apache2.2-common を選択しています。
(.../apache2.2-common_2.2.22-13+deb7u6_armhf.deb から) apache2.2-common を展開しています...
以前に未選択のパッケージ apache2-mpm-worker を選択しています。
(.../apache2-mpm-worker_2.2.22-13+deb7u6_armhf.deb から) apache2-mpm-worker を展開していま す...
以前に未選択のパッケージ apache2 を選択しています。
(.../apache2_2.2.22-13+deb7u6_armhf.deb から) apache2 を展開しています...
以前に未選択のパッケージ ssl-cert を選択しています。
(.../ssl-cert_1.0.32_all.deb から) ssl-cert を展開しています...
man-db のトリガを処理しています ...
libapr1 (1.4.6-3+deb7u1) を設定しています ...
libaprutil1 (1.4.1-3) を設定しています ...
libaprutil1-dbd-sqlite3 (1.4.1-3) を設定しています ...
libaprutil1-ldap (1.4.1-3) を設定しています ...
apache2.2-bin (2.2.22-13+deb7u6) を設定しています ...
apache2-utils (2.2.22-13+deb7u6) を設定しています ...
apache2.2-common (2.2.22-13+deb7u6) を設定しています ...
Enabling site default.
Enabling module alias.
Enabling module autoindex.
Enabling module dir.
Enabling module env.
Enabling module mime.
Enabling module negotiation.
Enabling module setenvif.
Enabling module status.
Enabling module auth_basic.
Enabling module deflate.
Enabling module authz_default.
Enabling module authz_user.
Enabling module authz_groupfile.
Enabling module authn_file.
Enabling module authz_host.
Enabling module reqtimeout.
apache2-mpm-worker (2.2.22-13+deb7u6) を設定しています ...
[....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
. ok
apache2 (2.2.22-13+deb7u6) を設定しています ...
ssl-cert (1.0.32) を設定しています ...
#
なんてことなく終わる。
Apacheの起動状況を確かめる
次に、
# insserv -s | egrep '(pache)|(ttp)'
K:01:0 1 6:apache2
S:02:2 3 4 5:apache2
#
……ぬぅ、StartなのかKillなのか、どっちやねん、というわけで、ブラウザにアドレスを入れてみると、
……と、普通にApacheは動いている。KとS両方出るのは、起動順が01、02となっていることから、Run-Level 0、1、6ではどうあろうと強制終了し、改めて2、3、4、5では起動、ということであろうか。
えーっと、自動起動のほうはこれでいいから、サービスの起動停止のテストは……、と。
# /etc/init.d/apache2 stop
[....] Stopping web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
[ ok waiting ..
root@satoraspi:~# /etc/init.d/apache2 start
[....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
. ok
#
ふむ、だいだい動いとる。
ドキュメントルートのindex.htmlを作る
とりあえず、indexだけ、かっこよくしておこう。えーっと、ドキュメントルートはどこかいな、と。
# ls -Fla /etc/ | egrep '(http)|(apache)'
drwxr-xr-x 7 root root 4096 8月 30 09:01 apache2/
root@satoraspi:~# ls /etc/apache2
apache2.conf envvars mods-available ports.conf sites-enabled
conf.d magic mods-enabled sites-available
# cd /etc/apache2
# grep 'DocumentRoot' */*
sites-available/default: DocumentRoot /var/www
sites-available/default-ssl: DocumentRoot /var/www
sites-enabled/000-default: DocumentRoot /var/www
……と、いうわけで普通に「/var/www」の下じゃのう。普通のユーザに戻って、
toshio@satoraspi:~$ cd /var/www
toshio@satoraspi:/var/www$ ls -Fla
合計 12
drwxr-xr-x 2 root root 4096 8月 30 09:01 ./
drwxr-xr-x 12 root root 4096 8月 30 09:01 ../
-rw-r--r-- 1 root root 177 8月 30 09:01 index.html
toshio@satoraspi:/var/www$ cat index.html
<html><body><h1>It works!</h1>
<p>This is the default web page for this server.</p>
<p>The web server software is running but no content has been added, yet.</p>
</body></html>toshio@satoraspi:/var/www$
はあ、さっきブラウザに出てたヤツでんな、と。
一応残しておいて……
toshio@satoraspi:/var/www$ sudo cp index.html .index.html.ORG
[sudo] password for toshio:
toshio@satoraspi:/var/www$ sudo chown toshio:pi index.html
toshio@satoraspi:/var/www$ ls -Fla
合計 16
drwxr-xr-x 2 root root 4096 8月 30 09:37 ./
drwxr-xr-x 12 root root 4096 8月 30 09:01 ../
-rw-r--r-- 1 root root 177 8月 30 09:37 .index.html.ORG
-rw-r--r-- 1 toshio pi 177 8月 30 09:01 index.html
toshio@satoraspi:/var/www$cd ..
toshio@satoraspi:/var$sudo chown toshio:pi www
toshio@satoraspi:/var$cd www
toshio@satoraspi:/var/www$vi index.html
んで、ばーっ、って、書くですよ。
<html>
<head>
<meta name="Editor" content="vim">
<meta http-equiv="Content-Type" content="text/html;charset=utf-8">
<link rel="icon" href="favicon.ico" type="image/x-icon" />
<link rel="Shortcut Icon" type="image/x-icon" href="favicon.ico" />
<title>おっさん用Raspberry Pi 2 Model B</title>
<meta http-equiv="Keyword" content="佐藤俊夫, 佐藤, 俊夫, SATOTOSHIO, SatoToshio, sato, toshio, Raspberry Pi, Raspberry Pi 2 Model B">
</head>
<body bgcolor="#888888">
<basefont size=4">
<center>
<table>
<tr>
<td>
<h1>おっさん用Raspberry Pi 2 Model B</h1>
<hr>
<center><img src="raspberry_pi.png"></center>
</td>
</tr>
<tr>
<td>
とりあえずまだ何もない。
</td>
</tr>
</table>
</center>
</body>
</html>
んで、画像なんかをSCPでコピーして、まずはこんなindex.htmlですな。
それにしても、こんな、5千円かそこらのシングルボードでapache2のウェブサービスができるなんて、隔世の感があるな。
同じようにして、PHPをインストール
さておき、続いてPHPを入れよう。
toshio@satoraspi:/var/www$ cd
toshio@satoraspi:~$ su -
パスワード:
root@satoraspi:~# apt-cache search php5
dwoo - PHP5 template engine
libapache2-mod-php5 - server-side, HTML-embedded scripting language (Apache 2 module)
libapache2-mod-php5filter - server-side, HTML-embedded scripting language (apache 2 filter module)
libexpect-php5 - expect module for PHP 5
libgv-php5 - PHP5 bindings for graphviz
libkohana2-modules-php - lightweight PHP5 MVC framework (extension modules)
libkohana2-php - lightweight PHP5 MVC framework
libkohana3.1-core-php - PHP5 framework core classes
libkohana3.1-php - PHP5 framework metapackage
libkohana3.2-core-php - PHP5 framework core classes
libkohana3.2-php - PHP5 framework metapackage
libow-php5 - Dallas 1-wire support: PHP5 bindings
libphp-jpgraph - Object oriented graph library for php5
libphp-jpgraph-examples - Object oriented graph library for php5 (examples)
libphp5-embed - HTML-embedded scripting language (Embedded SAPI library)
php-doc - Documentation for PHP5
php-imlib - PHP Imlib2 Extension
php5 - server-side, HTML-embedded scripting language (metapackage)
php5-adodb - Extension optimising the ADOdb database abstraction library
php5-cgi - server-side, HTML-embedded scripting language (CGI binary)
php5-cli - command-line interpreter for the php5 scripting language
php5-common - Common files for packages built from the php5 source
php5-curl - CURL module for php5
php5-dbg - Debug symbols for PHP5
php5-dev - Files for PHP5 module development
php5-enchant - Enchant module for php5
php5-exactimage - fast image manipulation library (PHP bindings)
php5-ffmpeg - audio and video support via ffmpeg for php5
php5-fpm - server-side, HTML-embedded scripting language (FPM-CGI binary)
php5-gd - GD module for php5
php5-gdcm - Grassroots DICOM PHP5 bindings
php5-geoip - GeoIP module for php5
php5-gmp - GMP module for php5
php5-imagick - ImageMagick module for php5
php5-imap - IMAP module for php5
php5-interbase - interbase/firebird module for php5
php5-intl - internationalisation module for php5
php5-lasso - Library for Liberty Alliance and SAML protocols - PHP 5 bindings
php5-ldap - LDAP module for php5
php5-librdf - PHP5 language bindings for the Redland RDF library
php5-mapscript - php5-cgi module for MapServer
php5-mcrypt - MCrypt module for php5
php5-memcache - memcache extension module for PHP5
php5-memcached - memcached extension module for PHP5, uses libmemcached
php5-midgard2 - Midgard2 Content Repository - PHP5 language bindings and module
php5-ming - Ming module for php5
php5-mysql - MySQL module for php5
php5-mysqlnd - MySQL module for php5 (Native Driver)
php5-odbc - ODBC module for php5
php5-pgsql - PostgreSQL module for php5
php5-ps - ps module for PHP 5
php5-pspell - pspell module for php5
php5-radius - PECL radius module for PHP 5
php5-recode - recode module for php5
php5-remctl - PECL module for Kerberos-authenticated command execution
php5-rrd - rrd module for PHP 5
php5-sasl - Cyrus SASL extension for PHP 5
php5-snmp - SNMP module for php5
php5-sqlite - SQLite module for php5
php5-svn - PHP Bindings for the Subversion Revision control system
php5-sybase - Sybase / MS SQL Server module for php5
php5-tidy - tidy module for php5
php5-tokyo-tyrant - PHP interface to Tokyo Cabinet's network interface, Tokyo Tyrant
php5-vtkgdcm - Grassroots DICOM VTK PHP bindings
php5-xcache - Fast, stable PHP opcode cacher
php5-xdebug - Xdebug Module for PHP 5
php5-xmlrpc - XML-RPC module for php5
php5-xsl - XSL module for php5
phpunit - Unit testing suite for PHP5
root@satoraspi:~#
はあ、いっぱい出たけど、要するにPHP5があるんだよな。うん、うん。
root@satoraspi:~# apt-get -s install php5
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下の特別パッケージがインストールされます:
apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5-cli php5-common
提案パッケージ:
php-pear
以下のパッケージは「削除」されます:
apache2-mpm-worker
以下のパッケージが新たにインストールされます:
apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5 php5-cli
php5-common
アップグレード: 0 個、新規インストール: 8 個、削除: 1 個、保留: 0 個。
Remv apache2-mpm-worker [2.2.22-13+deb7u6] [apache2:armhf ]
Inst apache2-mpm-prefork (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Conf apache2-mpm-prefork (2.2.22-13+deb7u6 Raspbian:7.0/oldstable [armhf])
Inst lsof (4.86+dfsg-1 Raspbian:7.0/oldstable [armhf])
Inst php5-common (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
Inst libonig2 (5.9.1-1 Raspbian:7.0/oldstable [armhf])
Inst libqdbm14 (1.8.78-2 Raspbian:7.0/oldstable [armhf])
Inst libapache2-mod-php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
Inst php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [all])
Inst php5-cli (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
Conf lsof (4.86+dfsg-1 Raspbian:7.0/oldstable [armhf])
Conf php5-common (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
Conf libonig2 (5.9.1-1 Raspbian:7.0/oldstable [armhf])
Conf libqdbm14 (1.8.78-2 Raspbian:7.0/oldstable [armhf])
Conf libapache2-mod-php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
Conf php5 (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [all])
Conf php5-cli (5.4.44-0+deb7u1 Raspbian:7.0/oldstable [armhf])
root@satoraspi:~#
入れても大丈夫みたいだ。
root@satoraspi:~# apt-get install php5
パッケージリストを読み込んでいます... 完了
依存関係ツリーを作成しています
状態情報を読み取っています... 完了
以下の特別パッケージがインストールされます:
apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5-cli php5-common
提案パッケージ:
php-pear
以下のパッケージは「削除」されます:
apache2-mpm-worker
以下のパッケージが新たにインストールされます:
apache2-mpm-prefork libapache2-mod-php5 libonig2 libqdbm14 lsof php5 php5-cli
php5-common
アップグレード: 0 個、新規インストール: 8 個、削除: 1 個、保留: 0 個。
6,142 kB のアーカイブを取得する必要があります。
この操作後に追加で 17.3 MB のディスク容量が消費されます。
続行しますか [Y/n]? y
取得:1 http://mirrordirector.raspbian.org/raspbian/ wheezy/main apache2-mpm-prefork armhf 2.2.22-13+deb7u6 [2,342 B]
取得:2 http://mirrordirector.raspbian.org/raspbian/ wheezy/main lsof armhf 4.86+dfsg-1 [321 kB]
取得:3 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5-common armhf 5.4.44-0+deb7u1 [621 kB]
取得:4 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libonig2 armhf 5.9.1-1 [130 kB]
取得:5 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libqdbm14 armhf 1.8.78-2 [119 kB]
取得:6 http://mirrordirector.raspbian.org/raspbian/ wheezy/main libapache2-mod-php5 armhf 5.4.44-0+deb7u1 [2,479 kB]
取得:7 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5 all 5.4.44-0+deb7u1 [1,024 B]
取得:8 http://mirrordirector.raspbian.org/raspbian/ wheezy/main php5-cli armhf 5.4.44-0+deb7u1 [2,469 kB]
6,142 kB を 6秒 で取得しました (1,016 kB/s)
dpkg: apache2-mpm-worker: 依存関係に問題があります。しかし要求に従い削除しています:
apache2 は以下に依存 (depends) します: apache2-mpm-worker (= 2.2.22-13+deb7u6) | apache2-mpm-prefork (= 2.2.22-13+deb7u6) | apache2-mpm-event (= 2.2.22-13+deb7u6) | apache2-mpm-itk (= 2.2.22-13+deb7u6) ...しかし:
パッケージ apache2-mpm-worker は削除されようとしています。
パッケージ apache2-mpm-prefork はまだインストールされていません。
パッケージ apache2-mpm-event はまだインストールされていません。
パッケージ apache2-mpm-itk はまだインストールされていません。
(データベースを読み込んでいます ... 現在 79208 個のファイルとディレクトリがインストールされています。)
apache2-mpm-worker を削除しています ...
[....] Stopping web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
[ ok waiting ..
以前に未選択のパッケージ apache2-mpm-prefork を選択しています。
(データベースを読み込んでいます ... 現在 79203 個のファイルとディレクトリがインストールされています。)
(.../apache2-mpm-prefork_2.2.22-13+deb7u6_armhf.deb から) apache2-mpm-prefork を展開してい ます...
apache2-mpm-prefork (2.2.22-13+deb7u6) を設定しています ...
[....] Starting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
. ok
以前に未選択のパッケージ lsof を選択しています。
(データベースを読み込んでいます ... 現在 79208 個のファイルとディレクトリがインストールされています。)
(.../lsof_4.86+dfsg-1_armhf.deb から) lsof を展開しています...
以前に未選択のパッケージ php5-common を選択しています。
(.../php5-common_5.4.44-0+deb7u1_armhf.deb から) php5-common を展開しています...
以前に未選択のパッケージ libonig2 を選択しています。
(.../libonig2_5.9.1-1_armhf.deb から) libonig2 を展開しています...
以前に未選択のパッケージ libqdbm14 を選択しています。
(.../libqdbm14_1.8.78-2_armhf.deb から) libqdbm14 を展開しています...
以前に未選択のパッケージ libapache2-mod-php5 を選択しています。
(.../libapache2-mod-php5_5.4.44-0+deb7u1_armhf.deb から) libapache2-mod-php5 を展開しています...
以前に未選択のパッケージ php5 を選択しています。
(.../php5_5.4.44-0+deb7u1_all.deb から) php5 を展開しています...
以前に未選択のパッケージ php5-cli を選択しています。
(.../php5-cli_5.4.44-0+deb7u1_armhf.deb から) php5-cli を展開しています...
man-db のトリガを処理しています ...
lsof (4.86+dfsg-1) を設定しています ...
php5-common (5.4.44-0+deb7u1) を設定しています ...
Creating config file /etc/php5/mods-available/pdo.ini with new version
libonig2 (5.9.1-1) を設定しています ...
libqdbm14 (1.8.78-2) を設定しています ...
libapache2-mod-php5 (5.4.44-0+deb7u1) を設定しています ...
Creating config file /etc/php5/apache2/php.ini with new version
[....] Restarting web server: apache2apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
... waiting apache2: Could not reliably determine the server's fully qualified domain name, using 127.0.1.1 for ServerName
. ok
php5 (5.4.44-0+deb7u1) を設定しています ...
php5-cli (5.4.44-0+deb7u1) を設定しています ...
Creating config file /etc/php5/cli/php.ini with new version
update-alternatives: /usr/bin/php (php) を提供するために 自動モード で /usr/bin/php5 を使います
root@satoraspi:~#
……と、いうわけで、サクッと入る。
PHPの作動を確かめる
それでは早速……。
root@satoraspi:/var/www# ログアウト
toshio@satoraspi:~$ cd /var/www
toshio@satoraspi:/var/www$ vi infotest.php
で、中身はこじんまりとこう書いて……
<html>
<head></head>
<body>
<?phpinfo();?>
</body>
</html>
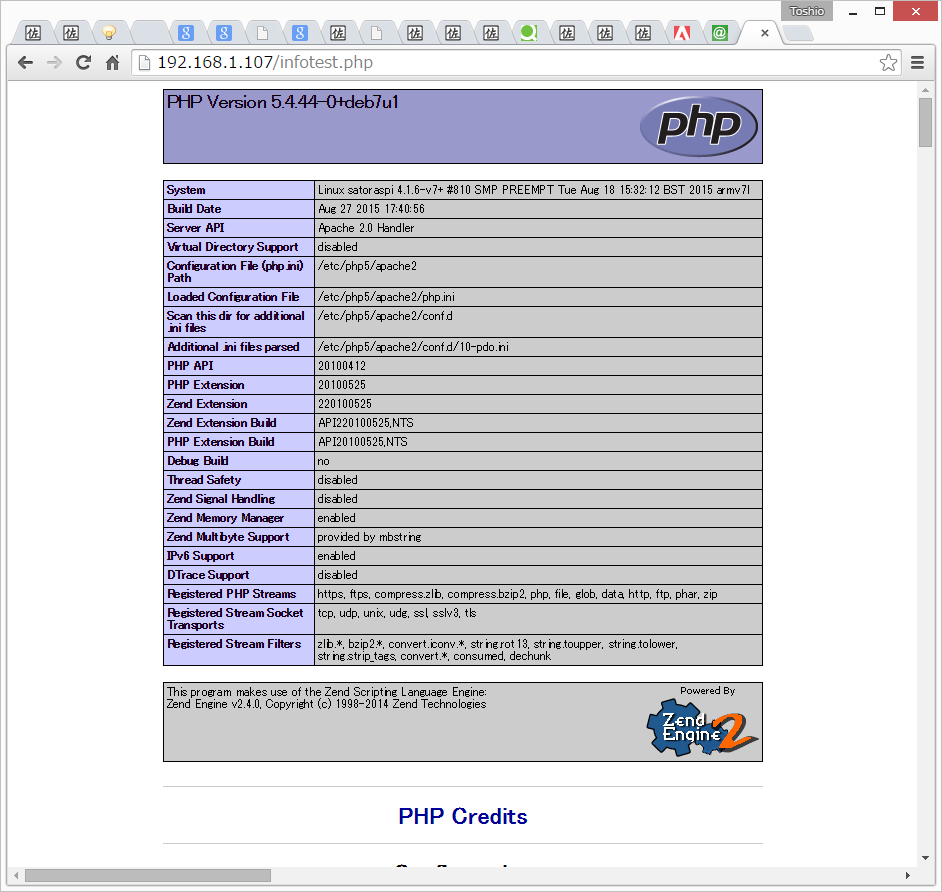
早速ブラウザで見ると……
うん。動いちょる動いちょる。
さっそくPHPでLチカ
さて、次に、phpからGPIOだな。マンネリだけどやっぱり「Lチカ」か。
「web2LED.php」
<html>
<head>
<meta name="Editor" content="vim">
<meta http-equiv="Content-Type" content="text/html;charset=utf-8">
<link rel="icon" href="favicon.ico" type="image/x-icon" />
<link rel="Shortcut Icon" type="image/x-icon" href="favicon.ico" />
<title>PHPでLチカ</title>
<meta http-equiv="Keyword" content="佐藤俊夫, 佐藤, 俊夫, SATOTOSHIO, SatoToshio, sato, toshio, Raspberry Pi, Raspberry Pi 2 Model B">
</head>
<body bgcolor="#888888">
<body>
<center>
<h1>PHPでLチカ</h1>
<hr>
<form method="POST">
<input type="submit" name="on" value="LED on"><br>
<input type="submit" name="off" value="LED off">
</form>
</center>
<?
ini_set( 'display_errors', 1 );
file_put_contents('/sys/class/gpio/export', 17);
file_put_contents('/sys/class/gpio/gpio17/direction', 'out');
if(isset($_POST['on'])){
file_put_contents('/sys/class/gpio/gpio17/value', 1);
print("LED ON.");
}elseif(isset($_POST['off'])){
file_put_contents('/sys/class/gpio/gpio17/value', 0);
print("LED OFF.");
}
file_put_contents('/sys/class/gpio/unexport', 17);
?>
</body>
</html>
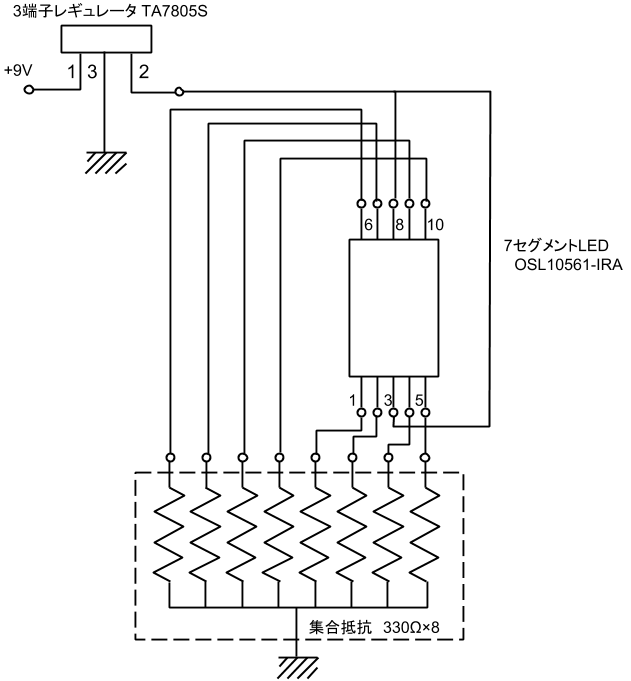
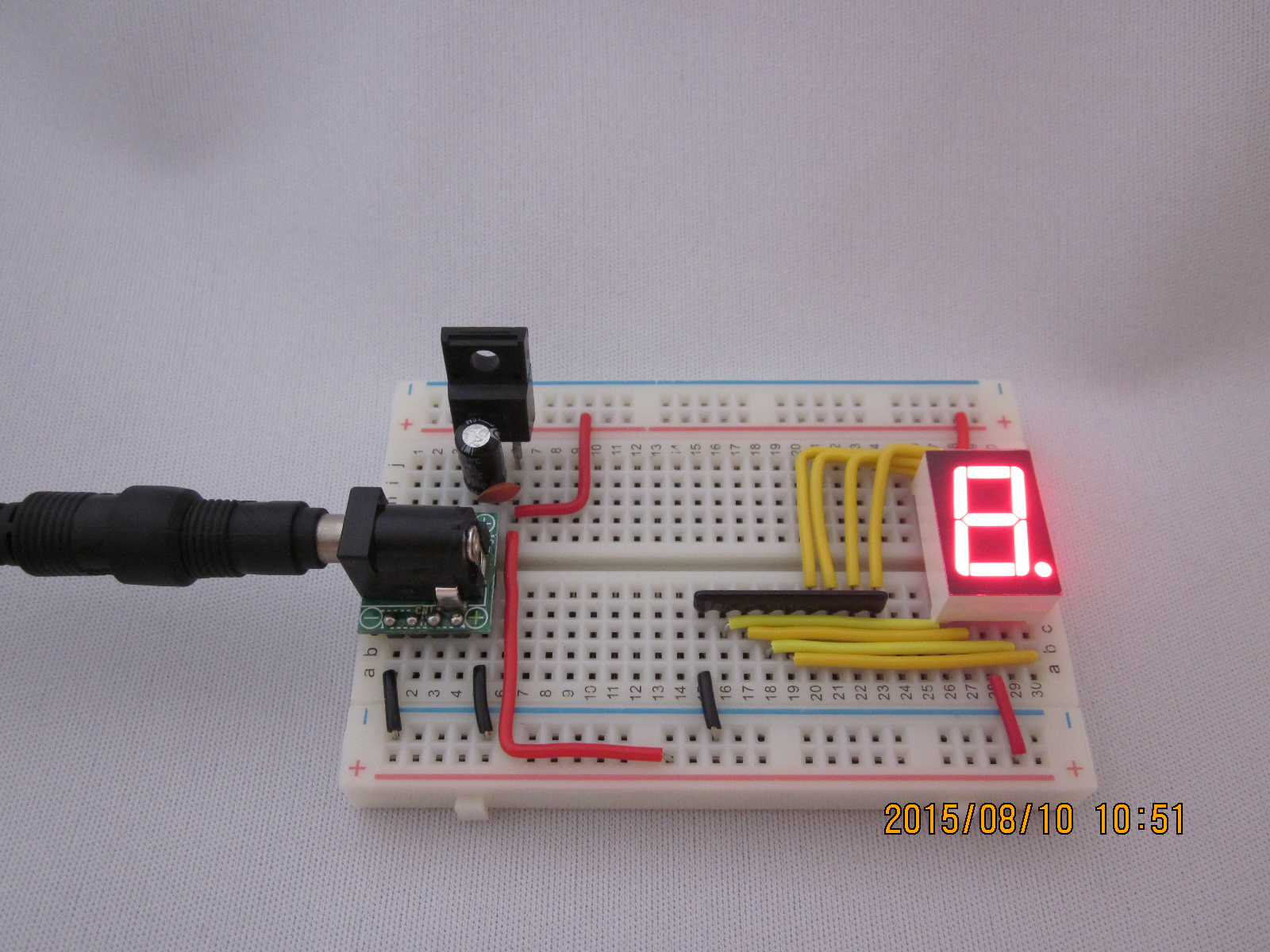
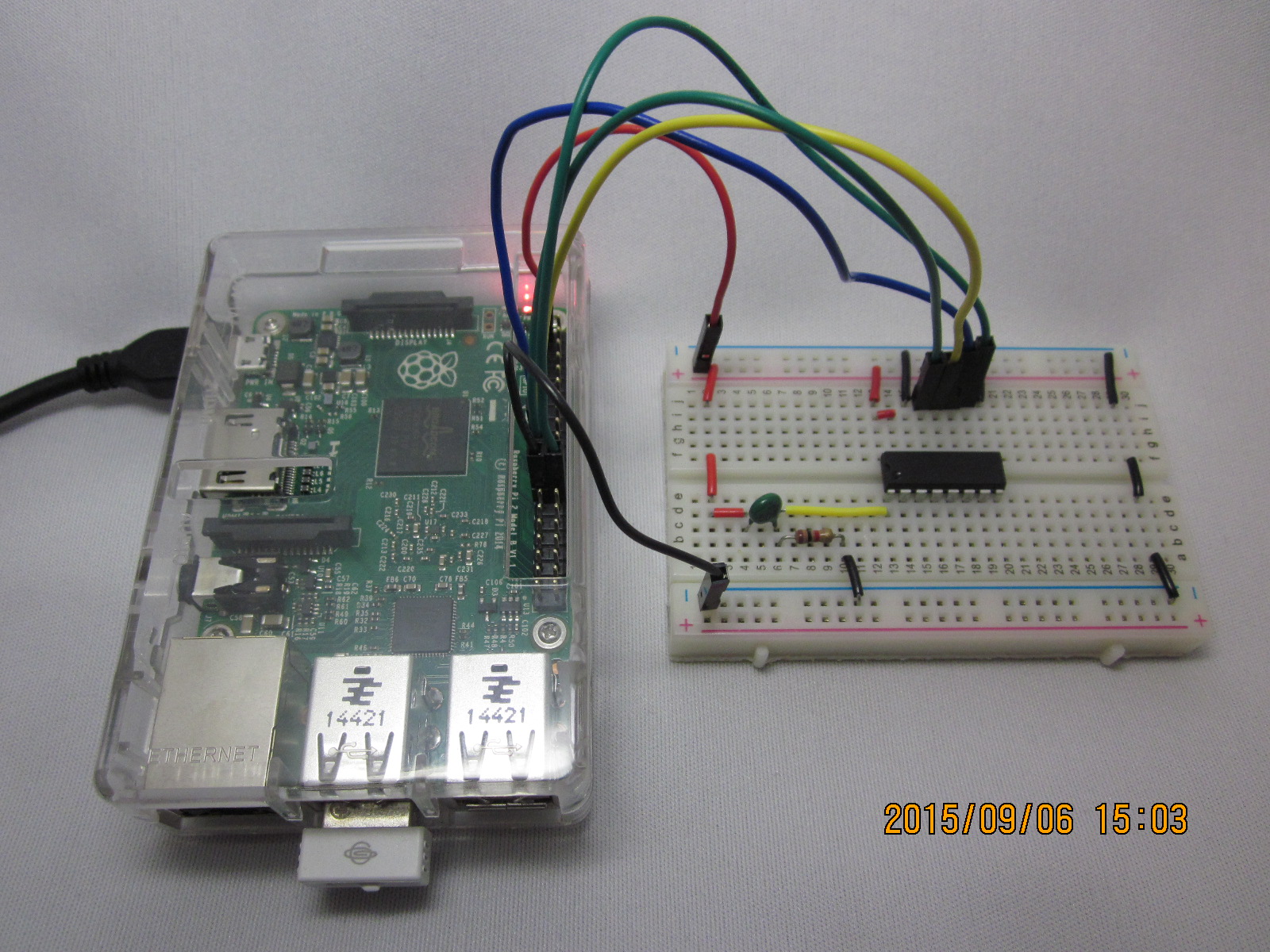
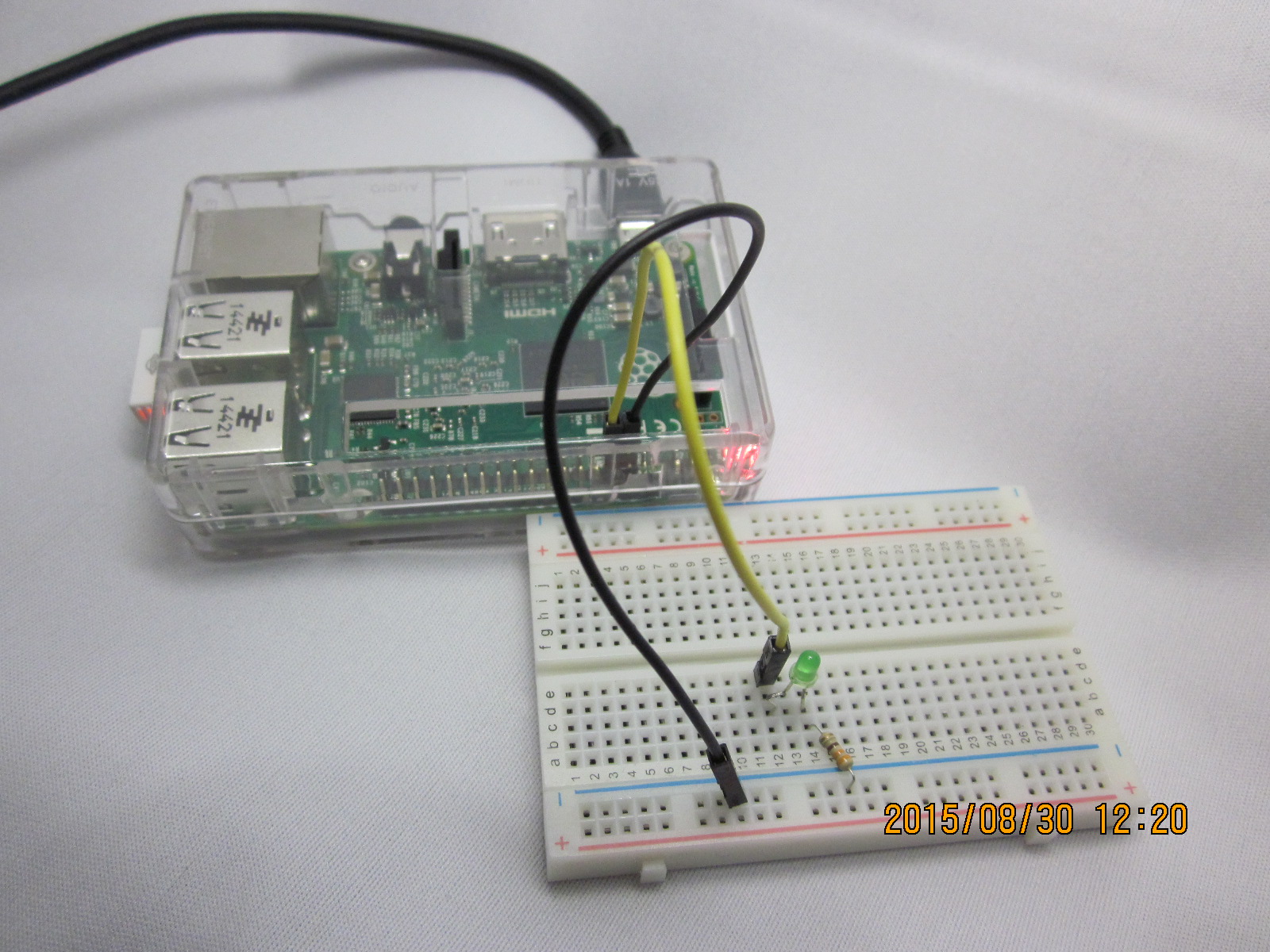
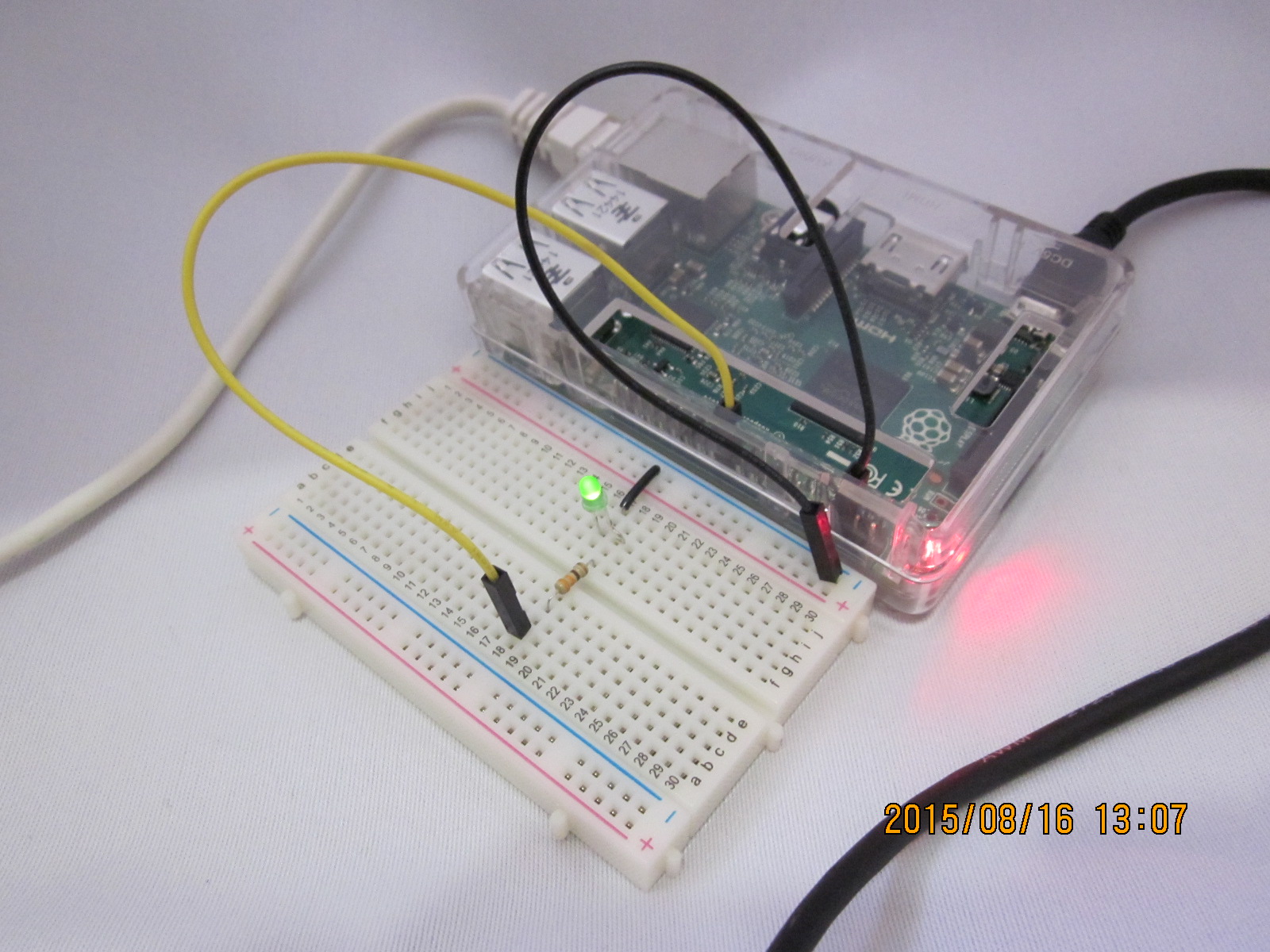
ブレッドボードにLEDと330Ωの抵抗を直列につけて、17番ピンとアースにつなぐ。
で、こういうフォームになるのだが……
いや、そりゃまあ、動くわけないわな、GPIOはrootでなきゃ読み書きできんのだから。
GPIOのパーミションの調整
えーっと、どうやったらいいかな、ということで、
「sudoする」
「GPIOのアクセス権をヌルくする」
「PHPの実行ユーザを強くする」
「何かをSUID」
……などと、いろいろあるが、どうも、どれもいまいち、ピンと来ないな……。
まあ、GPIOのアクセスをヌルくする、これかなあ……。
toshio@satoraspi:~$ cd /sys/class
toshio@satoraspi:/sys/class$ su
パスワード:
root@satoraspi:/sys/class# chmod -R 777 gpio
root@satoraspi:/sys/class# ls -Flad gpio
drwxrwxrwx 2 root gpio 0 8月 30 13:20 gpio/
root@satoraspi:/sys/class#
なんっか、もう、力いっぱい777丸出しですけどね(笑)。多分、700とか760でも大丈夫じゃないかなあ。試してないけど。
で、まあ、これで、フォームをクリックするとLEDが点いたり消えたりする。
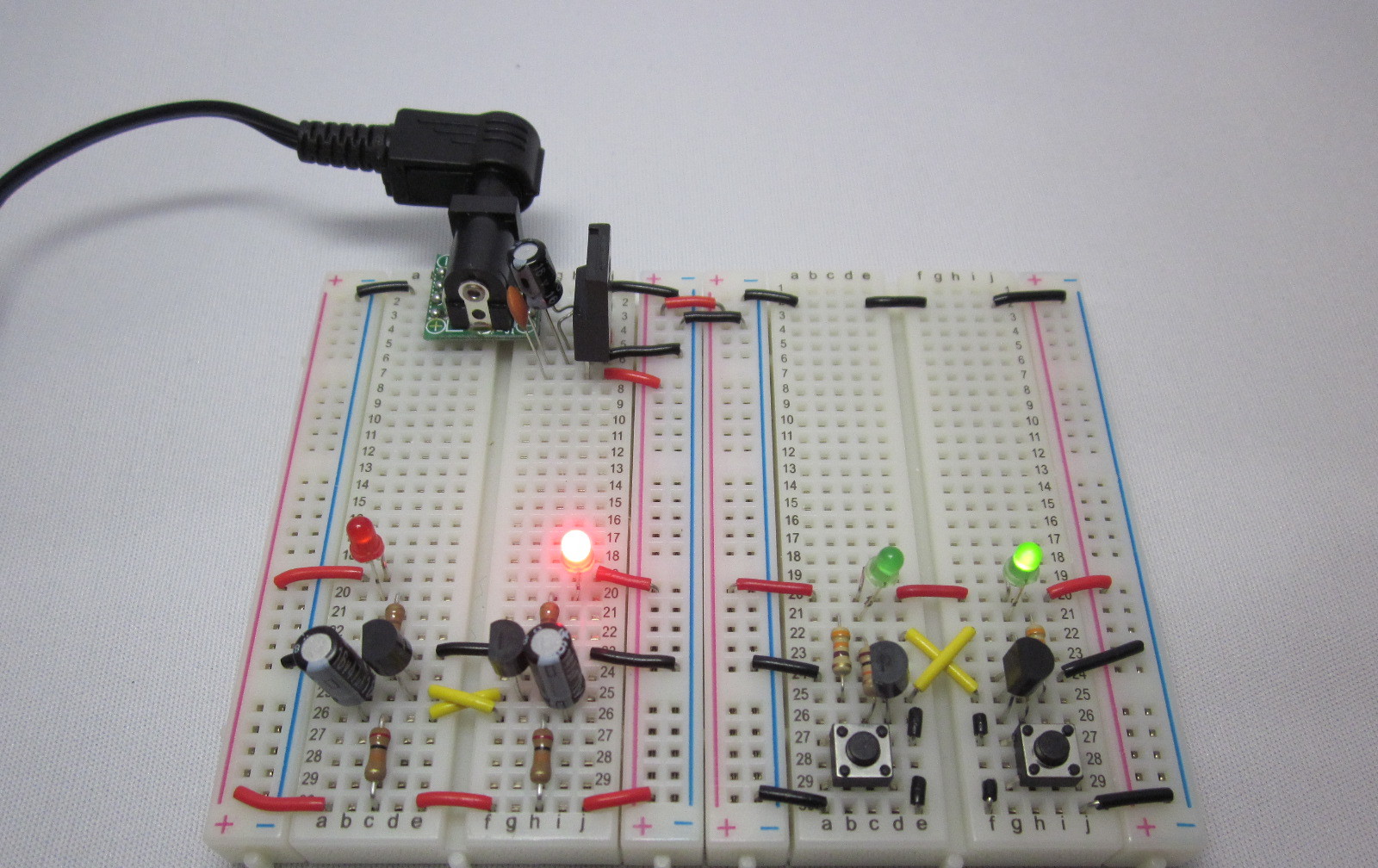
Raspberry Pi + Apache + PHP + SSRでAC100Vの家電製品を制御
これをそのまま、いつぞやArduinoでやったSSR(ソリッド・ステート・リレー) につなぐと、家電製品のオン・オフなどができるわけだ。
SSRモジュール
では、やってみよう。
Raspberry Pi 2で扇風機のオン・オフVIDEO
真ん中の黒い箱がSSRだ。Arduinoは5V、Raspberry Pi 2は3.3Vで電圧が違うが、このSSRは3Vから8Vまでの入力を受け付けるので、大丈夫なのである。
 昨日試した「
昨日試した「






















 ……とあるから、
……とあるから、 として、
として、