免許証とSuicaと住基カードとTポイントカードとVISAと銀行キャッシュカードを全部1枚におさめることは、技術上は可能なのだが、「絶対ダメーーーーーっ!」と絶叫するものすごい人々がいるので、ダメなのだろうなあ。
全部1枚になったほうがよっぽど便利だと思うが、便利と言うものはだいたいは人生の敵だから、まあ、カードがバラバラにあるのは、それはそれでよい。
オッサンは生きている。
免許証とSuicaと住基カードとTポイントカードとVISAと銀行キャッシュカードを全部1枚におさめることは、技術上は可能なのだが、「絶対ダメーーーーーっ!」と絶叫するものすごい人々がいるので、ダメなのだろうなあ。
全部1枚になったほうがよっぽど便利だと思うが、便利と言うものはだいたいは人生の敵だから、まあ、カードがバラバラにあるのは、それはそれでよい。
LEDを強力に光らせることが出来たので、いよいよWebサーバつき多機能リモコンを作成する。卓上などに置いておき、ネットワークにつないで、スマホなどから複数の電化製品を操作できるというものだ。
ここでは、いくつかのテクニックを使った。
一つは、フォームが大きくなってしまい、ハードコーディングするとメモリが足りなくなる。そこで、SDカード内にHTMLを置き、これを読み出すようにした。
同様に、リモコンから読み取った数値データが大きくなって、普通にハードコーディングしたのではメモリが不足する。そこで、「PROGMEM」というキーワードを使って、フラッシュメモリ内にデータを置き、これを読み出すようにした。
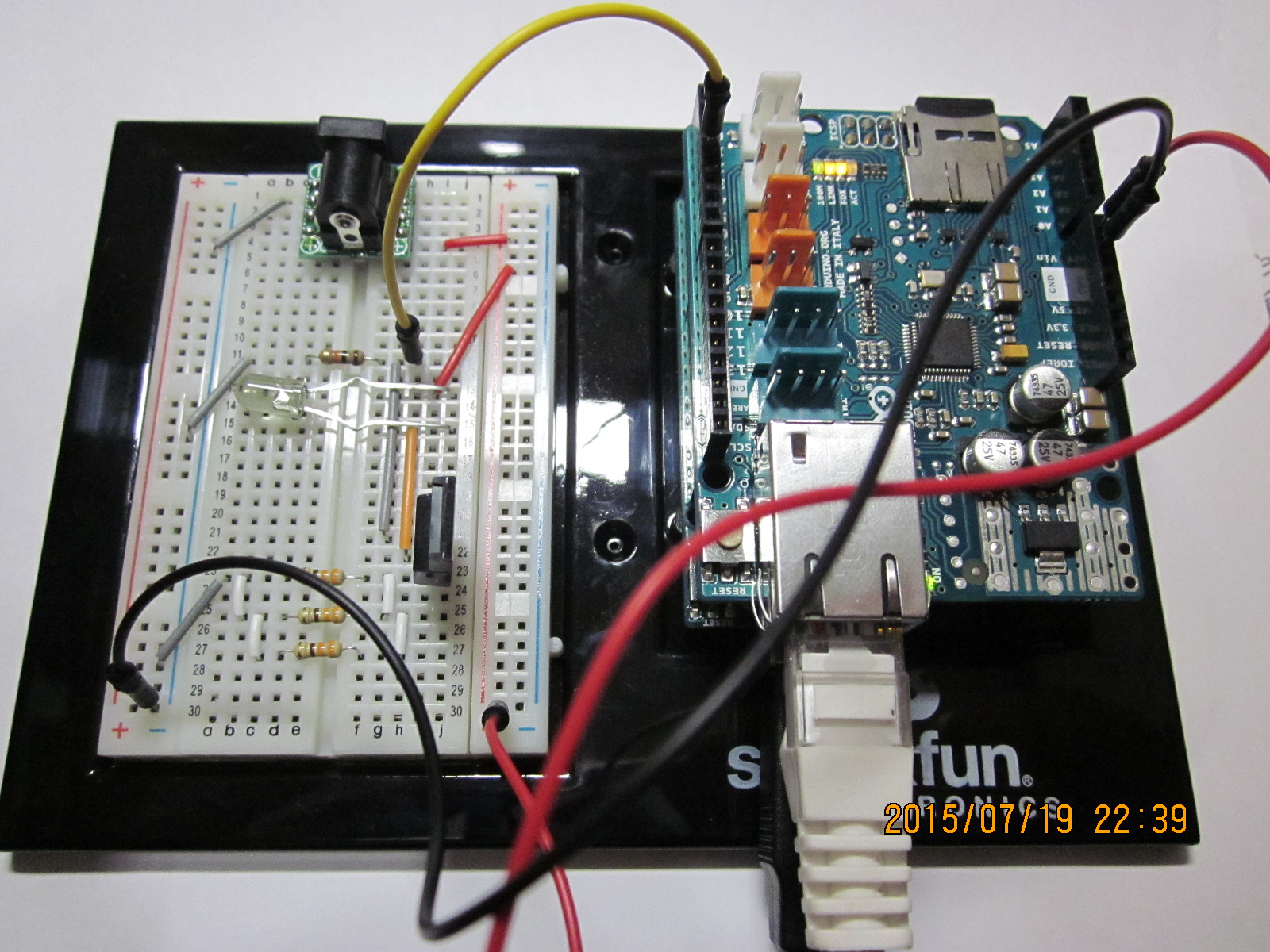 ETHERNET SHIELD 2を遺憾なく使う。SDカードを取り付けられるから、そこにHTMLを書き込んでおけばよい。FETをつけたブレッドボードと一緒に、買っておいたSparkfunの基盤に固定する。
ETHERNET SHIELD 2を遺憾なく使う。SDカードを取り付けられるから、そこにHTMLを書き込んでおけばよい。FETをつけたブレッドボードと一緒に、買っておいたSparkfunの基盤に固定する。
SDカード内には、次のようなHTMLを置き、ファイル名を「irform.htm」とする。
<html>
<head>
<meta name="Editor" content="Notepad.exe">
<meta http-equiv="Content-Type" content="text/html;charset=Shift_JIS">
<title>Webリモコン</title>
<basefont size=4>
</head>
<body bgcolor="#ddffdd">
<center>
<h1><b>Webリモコン</b></h1>
<table>
<tr><td> 作成者 </td>
<td align="right">佐藤俊夫</td></tr>
<tr><td> 作成日時 </td>
<td align="right">27.07.19 (日) 1835</td></tr>
</table>
</center>
<hr>
<center>
<form method="get" name="irremote">
<table border=1>
<tr><th>機器</th><th>ボタン</th></tr>
<tr>
<td rowspan=4>扇風機</td>
<td><input submit type="submit" value="入/風量" name="fan_on"></td>
</tr>
<tr><td><input submit type="submit" value="タイマー" name="fan_timer"></td></tr>
<tr><td><input submit type="submit" value="首振" name="fan_swing"></td></tr>
<tr><td><input submit type="submit" value="切" name="fan_off"></td></tr>
</tr>
<tr>
<td rowspan=5>テレビ</td>
<td><input submit type="submit" value="入/切" name="tv_on_off"></td>
</tr>
<tr><td><input submit type="submit" value="音量大" name="tv_volup"></td></tr>
<tr><td><input submit type="submit" value="音量小" name="tv_voldown"></td></tr>
<tr><td><input submit type="submit" value="チャンネル>" name="tv_chup"></td></tr>
<tr><td><input submit type="submit" value="チャンネル<" name="tv_chdown"></td></tr>
</table>
</form>
</center>
</body>
</html>
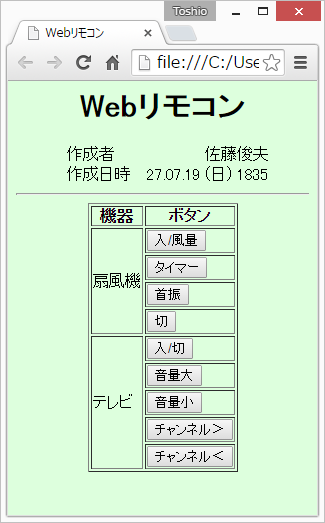 上のHTMLの見た目はこんな感じだ。
上のHTMLの見た目はこんな感じだ。
スケッチは次のようになる。
// // Web2IRremote.ino // リモコンをウェブで操作する。 // 27.07.25(日) 1930 // 佐藤俊夫 // #include <SPI.h> #include <Ethernet2.h> #include <SD.h> #include <IRremote.h> #include <avr/pgmspace.h> // byte mac[] = { 0x90, 0xA2, 0xDA, 0x0F, 0xF6, 0x74 }; IPAddress ip(192, 168, 1, 129); EthernetServer SERVER(80); EthernetClient CLIENT; IRsend irsend; PROGMEM const unsigned int fan_on[] = {4500,2150, 600,500, 650,500, 600,500, 600,500, 600,1650, 600,1600, 650,1550, 650,500, 600,1600, 650,1600, 600,1600, 650,450, 600,1600, 650,500, 600,500, 650,500, 600,1600, 600,500, 650,500, 600,500, 600,500, 600,500, 600,1650, 600,500, 600,500, 600,500, 650,1600, 600,1600, 600,1650, 600,1600, 600,500, 650,500, 600,0}, fan_timer[] = {4500,2150, 550,550, 550,600, 550,550, 600,500, 550,1700, 500,1700, 550,1650, 550,600, 550,1650, 550,1700, 500,1700, 550,600, 500,1700, 550,550, 550,550, 550,600, 500,1700, 550,600, 500,600, 500,600, 500,600, 550,550, 550,1700, 550,600, 450,600, 550,550, 550,600, 500,1700, 550,1650, 550,1700, 550,1650, 550,600, 500,0}, fan_swing[] = {4450,2200, 600,550, 550,500, 600,550, 550,550, 550,1700, 550,1650, 550,1700, 550,550, 550,1650, 550,1700, 550,1650, 550,550, 600,1650, 550,550, 550,550, 550,550, 600,1650, 550,550, 550,550, 600,550, 550,550, 550,550, 600,1600, 600,550, 550,550, 550,1650, 600,1550, 650,1700, 550,1650, 550,550, 550,550, 600,550, 550,0}, fan_off[] = {4450,2250, 550,550, 600,550, 550,500, 600,550, 550,1650, 600,1650, 550,1650, 600,550, 550,1650, 550,1650, 600,1650, 550,550, 550,1700, 550,550, 550,550, 550,550, 550,1700, 550,550, 550,550, 550,550, 600,550, 550,550, 550,1650, 550,550, 600,550, 550,1650, 600,1650, 550,550, 550,1700, 550,500, 600,550, 550,1650, 600,0}, tv_on_off[] = {3400,1750, 400,500, 350,1350, 400,500, 350,500, 400,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,500, 350,500, 350,1350, 400,500, 400,500, 350,450, 400,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 400,500, 350,500, 350,500, 400,450, 400,450, 400,1350, 400,500, 400,1300, 400,1350, 400,1350, 400,1350, 400,450, 400,500, 400,1300, 400,500, 400,1300, 400,1350, 400,1350, 400,1350, 400,500, 350,1350, 400,0}, tv_volup[] = {3400,1750, 400,500, 400,1300, 400,500, 400,500, 350,500, 450,400, 400,500, 350,500, 400,500, 350,500, 350,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 350,500, 400,500, 350,500, 400,500, 350,500, 350,500, 400,1300, 450,450, 400,500, 350,500, 400,500, 350,500, 400,450, 400,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 450,1250, 400,500, 400,500, 350,500, 400,450, 400,500, 350,500, 400,500, 350,1350, 400,450, 400,1350, 400,0}, tv_voldown[] = {3400,1750, 400,500, 350,1350, 400,500, 400,450, 400,500, 350,500, 400,450, 400,500, 400,500, 350,500, 350,500, 400,500, 350,500, 350,1300, 450,500, 400,500, 350,450, 400,500, 450,450, 350,500, 400,450, 400,450, 400,500, 400,1300, 450,500, 350,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 400,500, 350,1350, 400,500, 350,500, 400,1300, 400,500, 400,500, 350,500, 350,500, 400,1300, 450,500, 350,1350, 400,0}, tv_chup[] = {3400,1750, 400,500, 400,1350, 450,400, 400,450, 400,500, 450,400, 400,450, 400,500, 450,450, 450,400, 450,450, 400,400, 400,500, 450,1250, 450,500, 350,450, 500,400, 450,400, 400,500, 350,500, 450,450, 350,500, 450,450, 450,1250, 400,500, 450,400, 400,500, 400,450, 450,400, 450,450, 350,500, 450,400, 450,450, 350,500, 450,1250, 400,500, 450,1250, 500,1250, 500,400, 450,450, 350,500, 450,450, 350,1350, 450,450, 400,1300, 450,1250, 500,450, 400,1250, 450,0}, tv_chdown[] = {3500,1650, 450,500, 400,1300, 400,500, 450,400, 350,500, 400,450, 500,400, 450,450, 350,450, 400,500, 400,500, 350,500, 400,450, 450,1300, 450,450, 350,450, 450,500, 350,500, 450,400, 450,400, 400,500, 350,500, 450,400, 400,1350, 450,400, 500,400, 450,450, 450,400, 400,500, 350,500, 350,500, 400,500, 350,1350, 450,450, 350,1350, 400,500, 350,1350, 500,1250, 450,450, 450,400, 450,1250, 500,400, 450,1300, 450,450, 400,1300, 450,1250, 450,500, 350,1350, 450,0}; //// void setup() { const int chipSelect = 4; Ethernet.begin(mac, ip); SERVER.begin(); if (!SD.begin(chipSelect)) { return; } } void loop() { // Webサーバの動作 char c; String rstr = ""; CLIENT = SERVER.available(); if (CLIENT) { while (CLIENT.connected()) { if (CLIENT.available()) { c = CLIENT.read(); rstr += c; if(rstr.endsWith("\r\n")){ break; } } } if(rstr.indexOf("fan_on=") >= 0){ unsigned int buf[sizeof(fan_on) / sizeof(*fan_on)]; for(int i = 0; i < sizeof(fan_on) / sizeof(*fan_on); i++){ buf[i] = pgm_read_word(fan_on + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_timer=") >= 0){ unsigned int buf[sizeof(fan_timer) / sizeof(*fan_timer)]; for(int i = 0; i < sizeof(fan_timer) / sizeof(*fan_timer); i++){ buf[i] = pgm_read_word(fan_timer + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_swing=") >= 0){ unsigned int buf[sizeof(fan_swing) / sizeof(*fan_swing)]; for(int i = 0; i < sizeof(fan_swing) / sizeof(*fan_swing); i++){ buf[i] = pgm_read_word(fan_swing + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_off=") >= 0){ unsigned int buf[sizeof(fan_off) / sizeof(*fan_off)]; for(int i = 0; i < sizeof(fan_off) / sizeof(*fan_off); i++){ buf[i] = pgm_read_word(fan_off + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_on_off=") >= 0){ unsigned int buf[sizeof(tv_on_off) / sizeof(*tv_on_off)]; for(int i = 0; i < sizeof(tv_on_off) / sizeof(*tv_on_off); i++){ buf[i] = pgm_read_word(tv_on_off + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_volup=") >= 0){ unsigned int buf[sizeof(tv_volup) / sizeof(*tv_volup)]; for(int i = 0; i < sizeof(tv_volup) / sizeof(*tv_volup); i++){ buf[i] = pgm_read_word(tv_volup + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_voldown=") >= 0){ unsigned int buf[sizeof(tv_voldown) / sizeof(*tv_voldown)]; for(int i = 0; i < sizeof(tv_voldown) / sizeof(*tv_voldown); i++){ buf[i] = pgm_read_word(tv_voldown + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_chup=") >= 0){ unsigned int buf[sizeof(tv_chup) / sizeof(*tv_chup)]; for(int i = 0; i < sizeof(tv_chup) / sizeof(*tv_chup); i++){ buf[i] = pgm_read_word(tv_chup + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_chdown=") >= 0){ unsigned int buf[sizeof(tv_chdown) / sizeof(*tv_chdown)]; for(int i = 0; i < sizeof(tv_chdown) / sizeof(*tv_chdown); i++){ buf[i] = pgm_read_word(tv_chdown + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } rstr = ""; sendform(); delay(1); // close the connection: CLIENT.stop(); } delay(20); } void sendform(){ // フォームを送る。 CLIENT.println("HTTP/1.1 200 OK"); CLIENT.println("Content-Type: text/html"); CLIENT.println("Connection: close"); CLIENT.println(); CLIENT.println("<!DOCTYPE HTML>"); File html = SD.open("irform.htm"); if (html) { while (html.available()) { CLIENT.write(html.read()); } html.close(); } }
 勿論、ただのWebであるから、このようにスマホの他、タブレットなどからも操作可能である。また、ルータでポートフォワードすれば、外出先からの操作も可能である。
勿論、ただのWebであるから、このようにスマホの他、タブレットなどからも操作可能である。また、ルータでポートフォワードすれば、外出先からの操作も可能である。
さて、前回のこのエントリでは、赤外線LEDでリモコンを作る基礎が整ったが、50mA定格のLEDに5mAしか流していないので、いまいち光り方に根性がなく、電気製品の受光部にかなり近づけないと厳しい。
そこで、どっぷり50mA近くまで電流を流し、赤外線LEDをして「ご主人様もうお腹いっぱいゲフォア」と言わしめたい。
運よく、以前にソレノイドを動かした時のFET「2SK2232」がある。
50mA近く流すには
……ということで、100Ωかましてやればいいが、ちょうど100Ωの抵抗は持っていない。で、330Ωがあるから、これを3本並列にして
110Ωに5V流せば
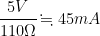
……というわけで、じゃぶじゃぶ流せる。2SK2232のドレイン電流は25Aなので、余裕でオッケーである。
 と、いうわけで、回路図とブレッドボードはこうなる。
と、いうわけで、回路図とブレッドボードはこうなる。
スケッチは前回と同じでいい。
動かしてデジカメのモニタで観察すると、もう、ビカビカにLEDが光る光るッ!。そんなに受光部に近づけなくても、ばりばり扇風機のスイッチがオンオフできるようになった。
 他の方のサイトでも、赤外線LEDを買ってきてArduinoで便利なリモコンを作る、ということをやっているので、私も真似したく、赤外線LEDを買ってきた。
他の方のサイトでも、赤外線LEDを買ってきてArduinoで便利なリモコンを作る、ということをやっているので、私も真似したく、赤外線LEDを買ってきた。
10個も入っていて100円である。
受信機はこの前800円で買ったリモコンと受信モジュールのセットがあるから、これでよい。
この赤外線LEDは50mA流す規格なので、20mAしか流せないArduinoで光らせるには少し大き過ぎる。1kΩばかり抵抗をつけて5mAくらいにする。暗くてリモコンが反応しないのじゃないかな、とも思ったが、受光部に近づければ大丈夫だ。しかし、デジカメで観察するとかなり暗い。もし、ちゃんとしたものを組み立てるのなら、FETなどでリレーして、他の電源から50mA流したほうがいいだろう。
今回は遊びなので、5mAで光らせる。
先達のサイトでは、スクラッチビルドのコードで市販のリモコンの信号を受信し、ミリ秒単位でオンオフ時間を計測して記録し、その通りに赤外線LEDを光らせてうまく行っている方が多いようだ。
一方、Arduinoには、「IRremote」というライブラリをGitHubで公開しておられる方がいるので、これを使えば簡単である。
GitHubのページからzip玉をもらって解凍し、できたディレクトリ(IRremote)をArduinoのインストールディレクトリの「libraries」の下にコピーすればよい。
今日は私の家のリビングの扇風機のリモコンで試してみよう。
リビングの扇風機のリモコン信号をコピーしてテストするには、ライブラリをインストールするとできるサンプルスケッチのうち、「IRrecord」というのを使う。コマンドメニューは「ファイル→スケッチの例→IRremote→IRrecord」と辿る。
これは、「1回こっきりの学習リモコン」のスケッチだと思えばよい。市販のリモコンを受信して記憶し、次いでボタンを押すとそのままそっくり信号のコピーを赤外線LEDから送出するスケッチだ。
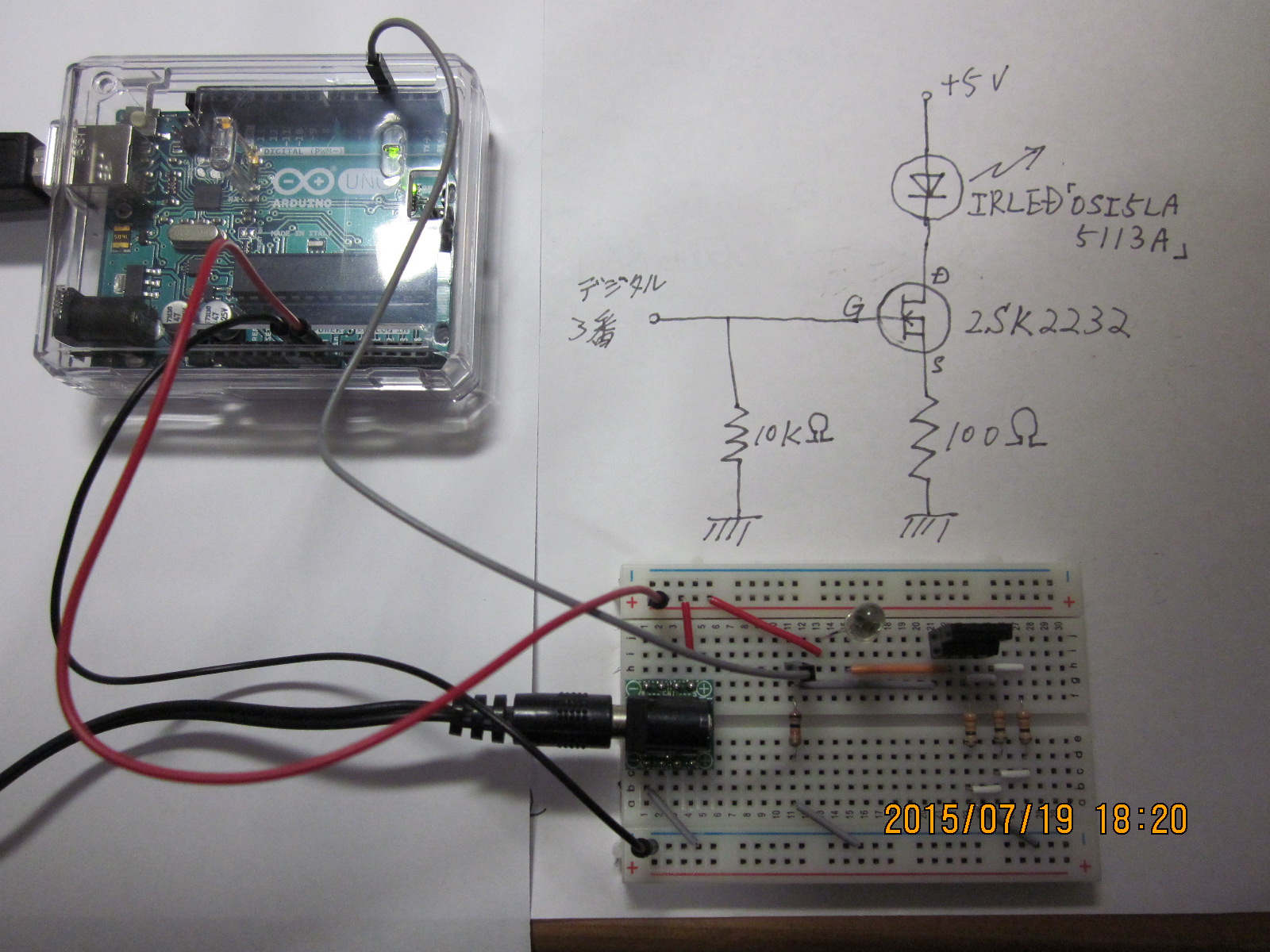
赤外線LEDは1kΩの抵抗と直列にしてデジタル3番ピンに、受信機は11番ピンに、タクトボタンを12番ピンにつなぐ。タクトボタンの入力側は10kΩの抵抗できちんとプルダウンしておくのが行儀がいい。そうしないと、手を触れたくらいのことでスイッチが入ってしまう。
ブレッドボードが出来たら、使いたいリモコンを受信機に近づけ、ボタンを押す。
それから今度は、ブレッドボード上の赤外線LEDを電気製品に近づけ、タクトボタンを押す。
そっくりコピーされた信号が送出され、扇風機が動く。
これで、ハードウェアは正しく動くことが分かったので、今度は単純にデータをハードコーディングで配列に書き出し、これを送出して扇風機のスイッチをオンオフさせる。
まず、データを記録する。それにはサンプルスケッチの「IRrecvDumpV2」を使う。今度は受信機を6番ピンにつなぎ換え、シリアルモニタを起動してデータを観測する。そうすると、そのまま使える形の配列の初期化定義の格好でダンプが出てくる。
これをクリップボードにコピーして、今度はサンプルスケッチの「IRSendDemo」にペーストし、送出してやればよい。
ところが、ここでハマッた、ハマッた。そのままではうまくいかないのである。
はじめ、私の扇風機では、「IRrecvDumpV2」のダンプはこうなった。
Encoding : UNKNOWN
Code : 1FB3782D (32 bits)
Timing[68]:
-22598
+4500, -2150 + 650, - 500 + 600, - 500 + 500, - 600
+ 550, - 550 + 650, -1600 + 600, -1600 + 550, -1700
+ 600, - 500 + 550, -1700 + 600, -1600 + 600, -1650
+ 550, - 550 + 600, -1600 + 600, - 500 + 650, - 500
+ 600, - 500 + 600, -1600 + 650, - 500 + 600, - 500
+ 600, - 500 + 600, - 500 + 600, - 500 + 650, -1600
+ 600, - 500 + 600, - 500 + 550, - 600 + 600, -1600
+ 600, -1600 + 550, -1700 + 600, -1600 + 650, - 500
+ 500, - 600 + 550,
unsigned int rawData[69] = {9627, 90,43, 13,10, 12,10, 10,12, 11,11, 13,32, 12,32, 11,34, 12,10, 11,34, 12,32, 12,33, 11,11, 12,32, 12,10, 13,10, 12,10, 12,32, 13,10, 12,10, 12,10, 12,10, 12,10, 13,32, 12,10, 12,10, 11,12, 12,32, 12,32, 11,34, 12,32, 13,10, 10,12, 11,0}; // UNKNOWN 1FB3782D
そこで私は、この「rawData[69]」をコピペし、次のようにした。
#include <IRremote.h> IRsend irsend; void setup() { Serial.begin(9600); } void loop() { static unsigned int rawData[] = {9627, 90,43, 13,10, 12,10, 10,12, 11,11, 13,32, 12,32, 11,34, 12,10, 11,34, 12,32, 12,33, 11,11, 12,32, 12,10, 13,10, 12,10, 12,32, 13,10, 12,10, 12,10, 12,10, 12,10, 13,32, 12,10, 12,10, 11,12, 12,32, 12,32, 11,34, 12,32, 13,10, 10,12, 11,0}; // UNKNOWN 1FB3782D if (Serial.read() != -1) { for (int i = 0; i < 3; i++) { irsend.sendRaw(rawData,sizeof(rawData) / sizeof(rawData[0]), 38); // Sony TV power code delay(40); } } }
ところが、これではまったくダメなのである。
最初は赤外線LEDの電流が足りないのかなあ、などと思い、半日ほどあっちこっちをいじくりまわして、ダメだった。
「IRrecord」での丸ごと信号コピーはうまく行っているのだから、電流が足りないわけではないらしい。
そこで、「IRrecord」のダンプ部分にコードを書き足し、「sendRaw()」関数にどんな値を渡しているかを見てみた。
else if (codeType == UNKNOWN /* i.e. raw */) { // Assume 38 KHz irsend.sendRaw(rawCodes, codeLen, 38); Serial.println("Sent raw"); Serial.println(codeLen); for(int cnt = 0; cnt <= codeLen; cnt++){ Serial.print(rawCodes[cnt]); Serial.print(","); } Serial.println("\n"); }
そうしたら、どうも、ダンプされた値の50倍が渡されているらしい。
4400,2250,550,600,500,600,500,600,500,600,550,1700,500,1700,500,1750,500,600,400,1800,550,1700,500,1650,550,600,550,1700,500,600,500,600,550,600,500,1700,550,550,450,650,550,600,500,600,500,600,450,1800,550,550,550,550,550,600,500,1700,550,1650,550,1700,500,1700,650,500,500,600,500,0,
そこで、「IRrecvDumpV2」のダンプ出力部分を次のようにカスタマイズした。
// Dump data for (int i = 0; i < results->rawlen; i++) { // Serial.print(results->rawbuf[i], DEC); Serial.print(results->rawbuf[i] * 50, DEC); Serial.print(","); if (!(i&1)) Serial.print(" "); }
そうすると、ダンプは……
ncoding : UNKNOWN
Code : FBB100E8 (32 bits)
Timing[68]:
-24324
+4550, -2150 + 650, - 450 + 650, - 450 + 650, - 500
+ 650, - 450 + 650, -1550 + 650, -1600 + 650, -1550
+ 650, - 450 + 650, -1600 + 650, -1550 + 700, -1550
+ 650, - 450 + 650, -1550 + 650, - 500 + 650, - 450
+ 650, - 450 + 650, -1600 + 600, - 500 + 650, - 450
+ 650, - 500 + 600, - 450 + 700, - 450 + 650, -1550
+ 650, - 500 + 650, - 450 + 650, - 450 + 650, -1600
+ 600, -1600 + 650, -1550 + 650, -1600 + 650, - 450
+ 650, - 450 + 650,
unsigned int rawData[69] = {24324, 4550,2150, 650,450, 650,450, 650,500, 650,450, 650,1550, 650,1600, 650,1550, 650,450, 650,1600, 650,1550, 700,1550, 650,450, 650,1550, 650,500, 650,450, 650,450, 650,1600, 600,500, 650,450, 650,500, 600,450, 700,450, 650,1550, 650,500, 650,450, 650,450, 650,1600, 600,1600, 650,1550, 650,1600, 650,450, 650,450, 650,0}; // UNKNOWN FBB100E8
……となる。
で、この先頭の「24324」は送信前の空き時間なので、捨ててよいようだ。「IRsendDemo」のほうにこれをコピペし、先頭の24324は消す。
#include <IRremote.h> IRsend irsend; void setup() { Serial.begin(9600); } void loop() { static unsigned int rawData[] = {4550,2150, 650,450, 650,450, 650,500, 650,450, 650,1550, 650,1600, 650,1550, 650,450, 650,1600, 650,1550, 700,1550, 650,450, 650,1550, 650,500, 650,450, 650,450, 650,1600, 600,500, 650,450, 650,500, 600,450, 700,450, 650,1550, 650,500, 650,450, 650,450, 650,1600, 600,1600, 650,1550, 650,1600, 650,450, 650,450, 650,0}; // UNKNOWN 1FB3782D if (Serial.read() != -1) { for (int i = 0; i < 3; i++) { irsend.sendRaw(rawData,sizeof(rawData) / sizeof(rawData[0]), 38); // Sony TV power code delay(40); } } }
これで、赤外線LEDを扇風機に近づけ、シリアルモニタの「送信」ボタンをクリックすると、扇風機がオン・オフされる。
 ブレッドボードは結局、最後はこんな感じ。
ブレッドボードは結局、最後はこんな感じ。