LEDを強力に光らせることが出来たので、いよいよWebサーバつき多機能リモコンを作成する。卓上などに置いておき、ネットワークにつないで、スマホなどから複数の電化製品を操作できるというものだ。
ここでは、いくつかのテクニックを使った。
一つは、フォームが大きくなってしまい、ハードコーディングするとメモリが足りなくなる。そこで、SDカード内にHTMLを置き、これを読み出すようにした。
同様に、リモコンから読み取った数値データが大きくなって、普通にハードコーディングしたのではメモリが不足する。そこで、「PROGMEM」というキーワードを使って、フラッシュメモリ内にデータを置き、これを読み出すようにした。
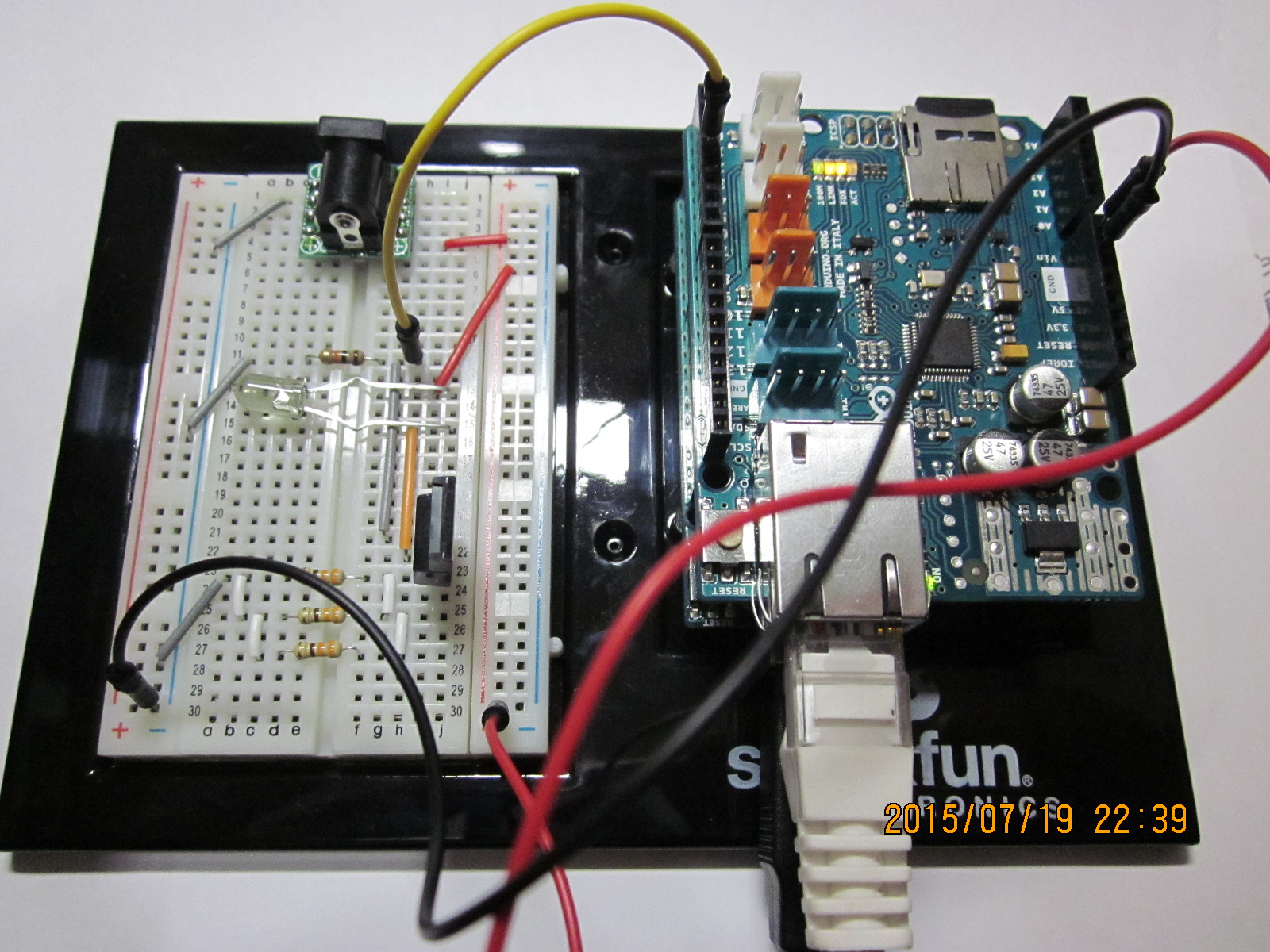 ETHERNET SHIELD 2を遺憾なく使う。SDカードを取り付けられるから、そこにHTMLを書き込んでおけばよい。FETをつけたブレッドボードと一緒に、買っておいたSparkfunの基盤に固定する。
ETHERNET SHIELD 2を遺憾なく使う。SDカードを取り付けられるから、そこにHTMLを書き込んでおけばよい。FETをつけたブレッドボードと一緒に、買っておいたSparkfunの基盤に固定する。
SDカード内には、次のようなHTMLを置き、ファイル名を「irform.htm」とする。
<html>
<head>
<meta name="Editor" content="Notepad.exe">
<meta http-equiv="Content-Type" content="text/html;charset=Shift_JIS">
<title>Webリモコン</title>
<basefont size=4>
</head>
<body bgcolor="#ddffdd">
<center>
<h1><b>Webリモコン</b></h1>
<table>
<tr><td> 作成者 </td>
<td align="right">佐藤俊夫</td></tr>
<tr><td> 作成日時 </td>
<td align="right">27.07.19 (日) 1835</td></tr>
</table>
</center>
<hr>
<center>
<form method="get" name="irremote">
<table border=1>
<tr><th>機器</th><th>ボタン</th></tr>
<tr>
<td rowspan=4>扇風機</td>
<td><input submit type="submit" value="入/風量" name="fan_on"></td>
</tr>
<tr><td><input submit type="submit" value="タイマー" name="fan_timer"></td></tr>
<tr><td><input submit type="submit" value="首振" name="fan_swing"></td></tr>
<tr><td><input submit type="submit" value="切" name="fan_off"></td></tr>
</tr>
<tr>
<td rowspan=5>テレビ</td>
<td><input submit type="submit" value="入/切" name="tv_on_off"></td>
</tr>
<tr><td><input submit type="submit" value="音量大" name="tv_volup"></td></tr>
<tr><td><input submit type="submit" value="音量小" name="tv_voldown"></td></tr>
<tr><td><input submit type="submit" value="チャンネル>" name="tv_chup"></td></tr>
<tr><td><input submit type="submit" value="チャンネル<" name="tv_chdown"></td></tr>
</table>
</form>
</center>
</body>
</html>
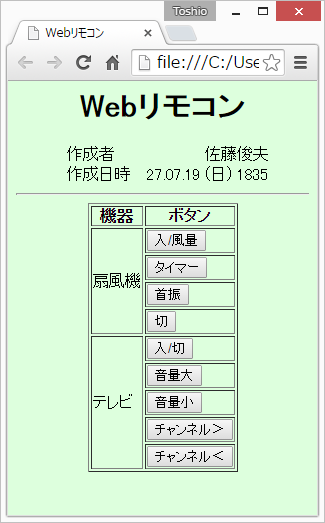 上のHTMLの見た目はこんな感じだ。
上のHTMLの見た目はこんな感じだ。
スケッチは次のようになる。
// // Web2IRremote.ino // リモコンをウェブで操作する。 // 27.07.25(日) 1930 // 佐藤俊夫 // #include <SPI.h> #include <Ethernet2.h> #include <SD.h> #include <IRremote.h> #include <avr/pgmspace.h> // byte mac[] = { 0x90, 0xA2, 0xDA, 0x0F, 0xF6, 0x74 }; IPAddress ip(192, 168, 1, 129); EthernetServer SERVER(80); EthernetClient CLIENT; IRsend irsend; PROGMEM const unsigned int fan_on[] = {4500,2150, 600,500, 650,500, 600,500, 600,500, 600,1650, 600,1600, 650,1550, 650,500, 600,1600, 650,1600, 600,1600, 650,450, 600,1600, 650,500, 600,500, 650,500, 600,1600, 600,500, 650,500, 600,500, 600,500, 600,500, 600,1650, 600,500, 600,500, 600,500, 650,1600, 600,1600, 600,1650, 600,1600, 600,500, 650,500, 600,0}, fan_timer[] = {4500,2150, 550,550, 550,600, 550,550, 600,500, 550,1700, 500,1700, 550,1650, 550,600, 550,1650, 550,1700, 500,1700, 550,600, 500,1700, 550,550, 550,550, 550,600, 500,1700, 550,600, 500,600, 500,600, 500,600, 550,550, 550,1700, 550,600, 450,600, 550,550, 550,600, 500,1700, 550,1650, 550,1700, 550,1650, 550,600, 500,0}, fan_swing[] = {4450,2200, 600,550, 550,500, 600,550, 550,550, 550,1700, 550,1650, 550,1700, 550,550, 550,1650, 550,1700, 550,1650, 550,550, 600,1650, 550,550, 550,550, 550,550, 600,1650, 550,550, 550,550, 600,550, 550,550, 550,550, 600,1600, 600,550, 550,550, 550,1650, 600,1550, 650,1700, 550,1650, 550,550, 550,550, 600,550, 550,0}, fan_off[] = {4450,2250, 550,550, 600,550, 550,500, 600,550, 550,1650, 600,1650, 550,1650, 600,550, 550,1650, 550,1650, 600,1650, 550,550, 550,1700, 550,550, 550,550, 550,550, 550,1700, 550,550, 550,550, 550,550, 600,550, 550,550, 550,1650, 550,550, 600,550, 550,1650, 600,1650, 550,550, 550,1700, 550,500, 600,550, 550,1650, 600,0}, tv_on_off[] = {3400,1750, 400,500, 350,1350, 400,500, 350,500, 400,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,500, 350,500, 350,1350, 400,500, 400,500, 350,450, 400,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 400,500, 350,500, 350,500, 400,450, 400,450, 400,1350, 400,500, 400,1300, 400,1350, 400,1350, 400,1350, 400,450, 400,500, 400,1300, 400,500, 400,1300, 400,1350, 400,1350, 400,1350, 400,500, 350,1350, 400,0}, tv_volup[] = {3400,1750, 400,500, 400,1300, 400,500, 400,500, 350,500, 450,400, 400,500, 350,500, 400,500, 350,500, 350,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 350,500, 400,500, 350,500, 400,500, 350,500, 350,500, 400,1300, 450,450, 400,500, 350,500, 400,500, 350,500, 400,450, 400,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 450,1250, 400,500, 400,500, 350,500, 400,450, 400,500, 350,500, 400,500, 350,1350, 400,450, 400,1350, 400,0}, tv_voldown[] = {3400,1750, 400,500, 350,1350, 400,500, 400,450, 400,500, 350,500, 400,450, 400,500, 400,500, 350,500, 350,500, 400,500, 350,500, 350,1300, 450,500, 400,500, 350,450, 400,500, 450,450, 350,500, 400,450, 400,450, 400,500, 400,1300, 450,500, 350,500, 350,500, 400,500, 350,450, 400,500, 400,500, 350,500, 400,1300, 400,500, 400,450, 400,500, 400,500, 350,1350, 400,500, 350,500, 400,1300, 400,500, 400,500, 350,500, 350,500, 400,1300, 450,500, 350,1350, 400,0}, tv_chup[] = {3400,1750, 400,500, 400,1350, 450,400, 400,450, 400,500, 450,400, 400,450, 400,500, 450,450, 450,400, 450,450, 400,400, 400,500, 450,1250, 450,500, 350,450, 500,400, 450,400, 400,500, 350,500, 450,450, 350,500, 450,450, 450,1250, 400,500, 450,400, 400,500, 400,450, 450,400, 450,450, 350,500, 450,400, 450,450, 350,500, 450,1250, 400,500, 450,1250, 500,1250, 500,400, 450,450, 350,500, 450,450, 350,1350, 450,450, 400,1300, 450,1250, 500,450, 400,1250, 450,0}, tv_chdown[] = {3500,1650, 450,500, 400,1300, 400,500, 450,400, 350,500, 400,450, 500,400, 450,450, 350,450, 400,500, 400,500, 350,500, 400,450, 450,1300, 450,450, 350,450, 450,500, 350,500, 450,400, 450,400, 400,500, 350,500, 450,400, 400,1350, 450,400, 500,400, 450,450, 450,400, 400,500, 350,500, 350,500, 400,500, 350,1350, 450,450, 350,1350, 400,500, 350,1350, 500,1250, 450,450, 450,400, 450,1250, 500,400, 450,1300, 450,450, 400,1300, 450,1250, 450,500, 350,1350, 450,0}; //// void setup() { const int chipSelect = 4; Ethernet.begin(mac, ip); SERVER.begin(); if (!SD.begin(chipSelect)) { return; } } void loop() { // Webサーバの動作 char c; String rstr = ""; CLIENT = SERVER.available(); if (CLIENT) { while (CLIENT.connected()) { if (CLIENT.available()) { c = CLIENT.read(); rstr += c; if(rstr.endsWith("\r\n")){ break; } } } if(rstr.indexOf("fan_on=") >= 0){ unsigned int buf[sizeof(fan_on) / sizeof(*fan_on)]; for(int i = 0; i < sizeof(fan_on) / sizeof(*fan_on); i++){ buf[i] = pgm_read_word(fan_on + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_timer=") >= 0){ unsigned int buf[sizeof(fan_timer) / sizeof(*fan_timer)]; for(int i = 0; i < sizeof(fan_timer) / sizeof(*fan_timer); i++){ buf[i] = pgm_read_word(fan_timer + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_swing=") >= 0){ unsigned int buf[sizeof(fan_swing) / sizeof(*fan_swing)]; for(int i = 0; i < sizeof(fan_swing) / sizeof(*fan_swing); i++){ buf[i] = pgm_read_word(fan_swing + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("fan_off=") >= 0){ unsigned int buf[sizeof(fan_off) / sizeof(*fan_off)]; for(int i = 0; i < sizeof(fan_off) / sizeof(*fan_off); i++){ buf[i] = pgm_read_word(fan_off + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_on_off=") >= 0){ unsigned int buf[sizeof(tv_on_off) / sizeof(*tv_on_off)]; for(int i = 0; i < sizeof(tv_on_off) / sizeof(*tv_on_off); i++){ buf[i] = pgm_read_word(tv_on_off + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_volup=") >= 0){ unsigned int buf[sizeof(tv_volup) / sizeof(*tv_volup)]; for(int i = 0; i < sizeof(tv_volup) / sizeof(*tv_volup); i++){ buf[i] = pgm_read_word(tv_volup + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_voldown=") >= 0){ unsigned int buf[sizeof(tv_voldown) / sizeof(*tv_voldown)]; for(int i = 0; i < sizeof(tv_voldown) / sizeof(*tv_voldown); i++){ buf[i] = pgm_read_word(tv_voldown + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_chup=") >= 0){ unsigned int buf[sizeof(tv_chup) / sizeof(*tv_chup)]; for(int i = 0; i < sizeof(tv_chup) / sizeof(*tv_chup); i++){ buf[i] = pgm_read_word(tv_chup + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } else if(rstr.indexOf("tv_chdown=") >= 0){ unsigned int buf[sizeof(tv_chdown) / sizeof(*tv_chdown)]; for(int i = 0; i < sizeof(tv_chdown) / sizeof(*tv_chdown); i++){ buf[i] = pgm_read_word(tv_chdown + i); } irsend.sendRaw(buf, sizeof(buf) / sizeof(buf[0]), 38); } rstr = ""; sendform(); delay(1); // close the connection: CLIENT.stop(); } delay(20); } void sendform(){ // フォームを送る。 CLIENT.println("HTTP/1.1 200 OK"); CLIENT.println("Content-Type: text/html"); CLIENT.println("Connection: close"); CLIENT.println(); CLIENT.println("<!DOCTYPE HTML>"); File html = SD.open("irform.htm"); if (html) { while (html.available()) { CLIENT.write(html.read()); } html.close(); } }
 勿論、ただのWebであるから、このようにスマホの他、タブレットなどからも操作可能である。また、ルータでポートフォワードすれば、外出先からの操作も可能である。
勿論、ただのWebであるから、このようにスマホの他、タブレットなどからも操作可能である。また、ルータでポートフォワードすれば、外出先からの操作も可能である。
「いよいよ多機能リモコン」への1件のフィードバック